architecture - rnanosaur/nanosaur GitHub Wiki
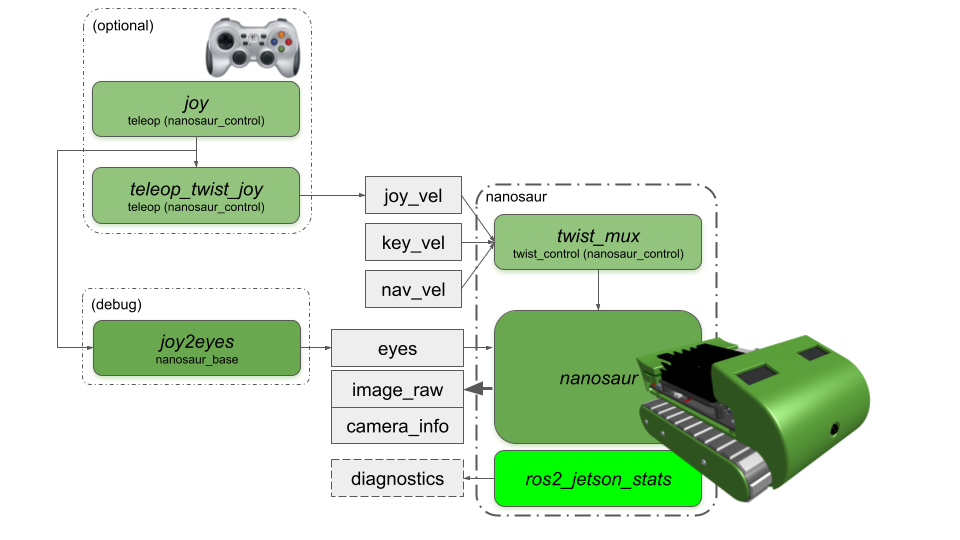
When you switch on your nanosaur, the ROS2 communication appears summarized like the picture below.
The joystick block (optional) node appears if you plug a joystick on the NVIDIA Jetson.
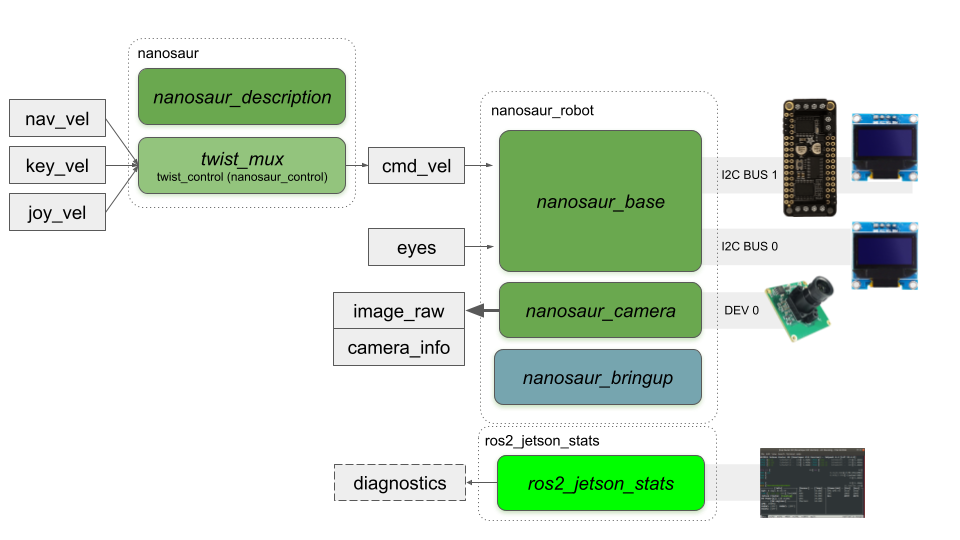
Nodes
Nanosaur has many nodes to drive and show the status of the robot. Below all nodes are arranged by package.
:package: nanosaur_base
- nanosaur_base enable the motor controller and the displays
- joy2eyes convert a joystick message to an eyes topic. This node is useful when you want to test the eyes topic.
:package: nanosaur_camera
- nanosaur_camera run the camera streamer from the MIPI camera to a ros2 topic
:package: ros2_jetson_stats
- jetson_stats is the wrapper of the jetson-stats package to monitor and control your NVIDIA Jetson [Xavier NX, Jetson AGX Xavier, Nano, TX1, or TX2].
A detailed overview from all nodes nanosaur block is described in the picture below: