Husky - norlab-ulaval/Norlab_wiki GitHub Wiki
Software
- Computer: Dell OptiPlex 3070 i7.
- Switch: Netgear GS308E
Network
Currently the switch, with the camera connected to it is not plugged in ! The switch is not used to do the routing between the lidar subnet (192.168.1) and the robot subnet (192.168.7) because the switch itself can not do the routing due to the model. After couple hours and the help of chat, it seems that the computer has a VLAN 14 that is use specifically to talk with the 192.168.1 and its normal ip adress that is 192.168.7.2.
The vlan is in (to show: ip -4 addr show enp1s0.14)
enp1s0.14@enp1s0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc noqueue state UP group default qlen 1000 inet 192.168.1.102/24 brd 192.168.1.255 scope global noprefixroute enp1s0.14 valid_lft forever preferred_lft forever
To create temporary a Vlan:
On husky:
sudo ip link add link enp1s0 name enp1s0.14 type vlan id 14
sudo ip addr add 192.168.1.102/24 dev enp1s0.14
sudo ip link set enp1s0.14 up
On the switch side:
VLAN settings
Create VLAN ID 14 Add:
PC port → Tagged (T)
LiDAR port → Untagged (U)
Set PVID = 14 on LiDAR port
If you can ping the lidar, make the change permanent by refering to the vlan14:
sudo micro /etc/netplan/90-NM-56a31287-3be5-44c0-afa6-b574bb47f6cc.yaml
Apply the changes :
netplan apply
Diagram saved at : Husky_network.drawio
Workspace
.
├── Desktop
│ └── credentials.txt
├── libraries
│ ├── libnabo
│ ├── libpointmatcher
│ ├── norlab_controllers
│ └── norlab_icp_mapper
└── ros2_ws
├── build
├── install
├── log
└── src
├── audio_common
├── drive
├── husky
├── imu_tools
├── joint_speed_filter
├── libpointmatcher_ros
├── LSC16
├── norlab_controllers_ros
├── norlab_icp_mapper_ros
├── norlab_imu_tools
├── norlab_robot
├── norlab_xsens_driver
├── odom_to_pose_converter
├── pointcloud_motion_deskew
├── service_caller
└── wiln
Norlab robot is a general package that's shared between all robots using ROS in the Northern Robotics Laboratory: norlab_robot.
Sensors
| Sensor | Brand | Model |
|---|---|---|
| Lidar | RS-LIDAR-32 | Robosense_RS-32_User_Guide.pdf |
| IMU | Xsens | MTI-100 |
| Lidar (x6) | Airy | airy documentation.pdf |
Mechanical
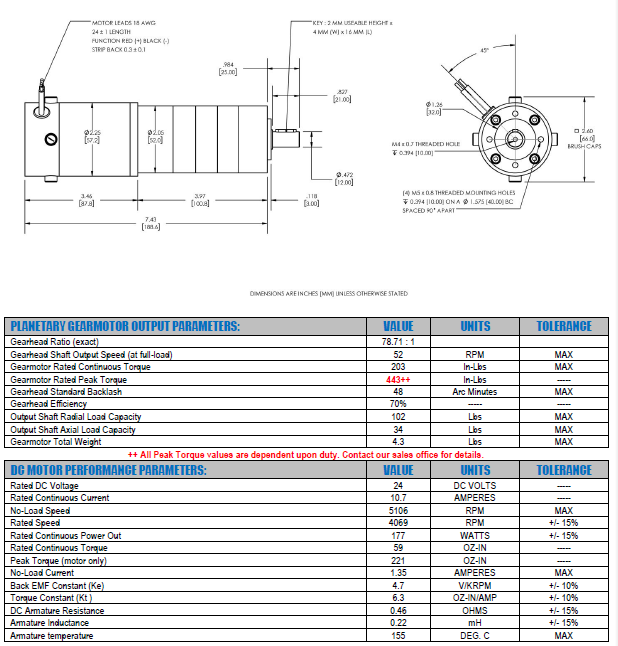
Motors
The Husky utilizes [MMP S22-346F-24 Robosense_RS-32_User_Guide.pdf V GP52-079](https://midwestmotion.com/products/brgp/24v/50-59rpm/200-265inlb/MMP%20S22-346F-24V%20GP52-079.pdf) motors with the following parameters :
Encoders
The motors are sharing a shaft with these encoders. These encoders have the reference US Digital E2-1024-375-IE-D-G-B
Drivers
The Husky is equipped two MDL-BDC24 motor drivers in a controller / device configuration. Communication between both drivers is done through a CAN bus (120 ohm resistors are plugged on each side), while communication with the main onboard computer is done through a serial port.
Mechanical Details
Baseline: 0.55 mWheel radius: 0.165 m