Home - mktk1117/six_wheel_robot GitHub Wiki
This is a project to make a six-wheel robot with Arduino and Raspberry Pi.
It consists with
- Six-wheel car platform
- Dual VNH3SP30 Motor Driver Carrier MD03A
- Battery
- Arduino
- Raspberry Pi
- Wifi module
- camera
Hardware architecture
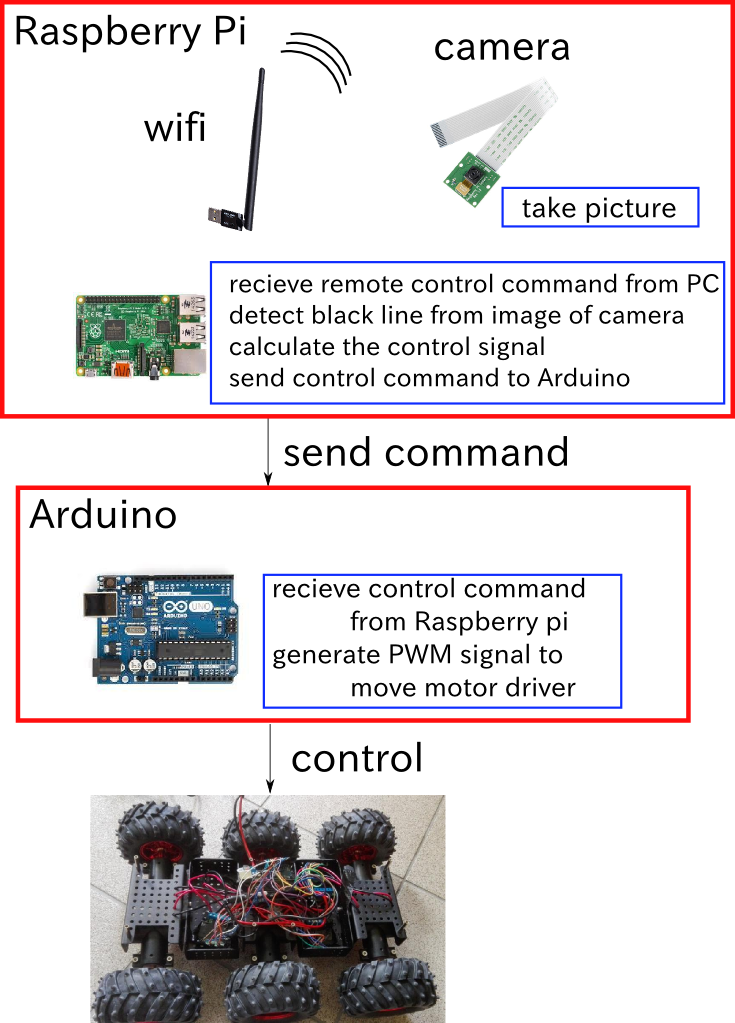
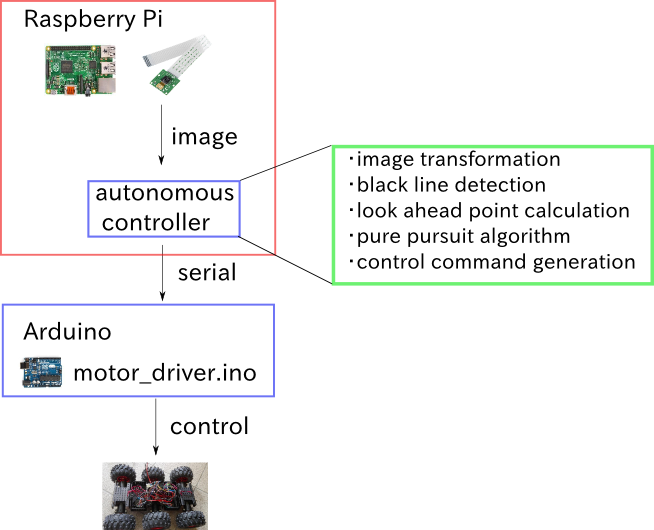
Software architecture
Architecture with node.js
This is the planned architecture.
However, there was a problem with Socket.IO in C++ so the next simple architecture was used.

Architecture without node.js
Since there was a problem, C++ process directly sends serial command to Arduino.
The disadvantage of this system is that we can't control the robot remotely.
Contents
- Using motor driver(MD03A) with Arduino
- Hardware settings of six wheel platform
- Raspberry Pi setup
- ROS installation and setup for Raspberry Pi
- Communication between Arduino and Raspberry Pi
- Communication between Raspberry Pi and PC (ROS)
- Communication between Raspberry Pi and PC (Node.js)
- Make a ROS package to communicate with Arduino to control motors
- Use raspberry pi camera module with OpenCV
- Black line detection with OpenCV