X PLANE TUTORIAL: X Plane v9.70 with ArduPlane v2.73 xp1 in HIL mode simulation - jlnaudin/x-drone GitHub Wiki
-
Download the firmware Arduplane v2.73-xp1: https://github.com/jlnaudin/x-drone/tree/master/Arduplane_273xp1
-
Connect the APM or ArduFlyer board to the USB com port:

-
Set the config file of the arduplane v2.73-xp1 as below and then compile it, don't forget to select the correct board (ArduPilot/HAL Board/ArduPilot Mega 2.x) and the comm port:

-
With the Mission Planner launch X-Plane v9.70
The X-Plane v9.70 can be downloaded at:http://www.x-plane.com/downloads/older/

Set the Roll, Pitch, Yaw, Throttle gains as below:

- If have don't already installed the Calmato for X-Plane,
download the model at:https://github.com/jlnaudin/x-drone/blob/master/x-plane%20aircrafts/Calmato.zip
Right-Click with the mouse on RAW so as to download and save the zip file on your desktop:

- then, unzip the calmato.zip on your desktop
- Copy the entire folder 'Calmato' into the x-Plane folder/Aircraft/Radio Control/
*Then, load the Calmato RC model:

Below, the network setup for X-Plane:




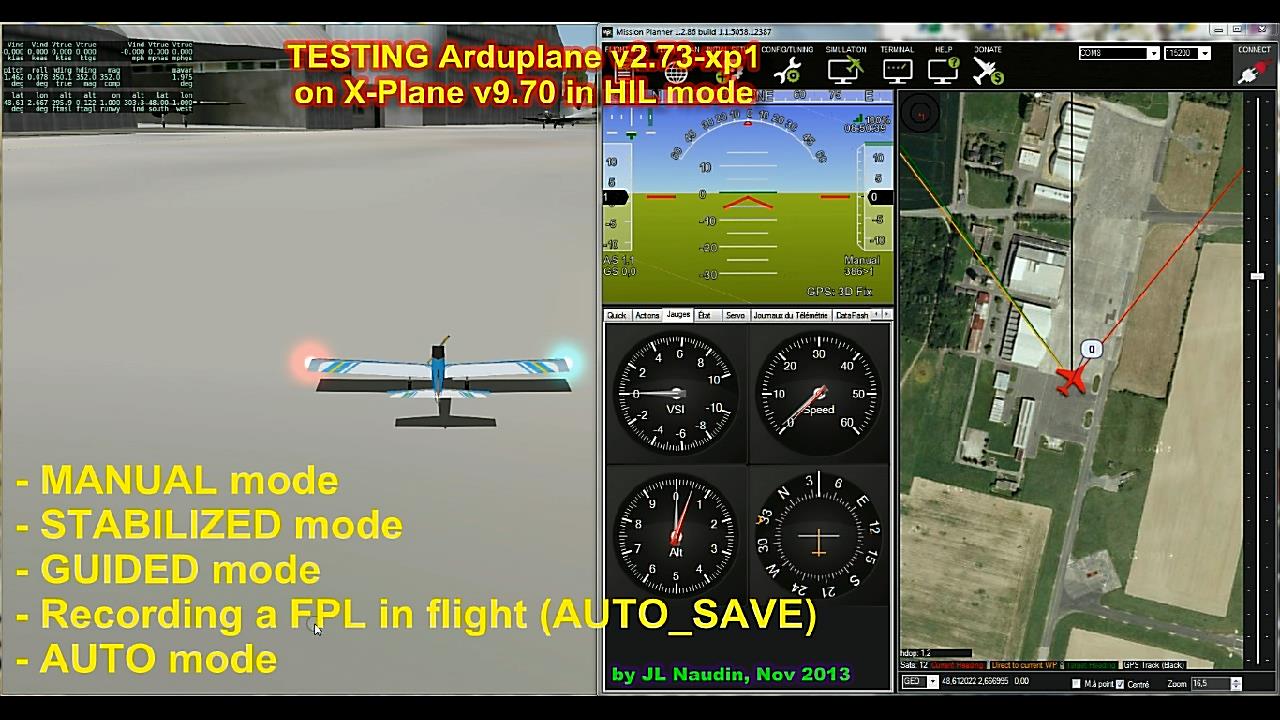
Now X-Plane can be used in HIL mode with your APM board through the mission planner:


Here a video of a full test in HIL mode with X-Plane v9.70 and ArduPlane v2.73-xp1:
http://player.vimeo.com/video/80052308
 (http://player.vimeo.com/video/80052308)
(http://player.vimeo.com/video/80052308)