Section 2 Geometric OGM - ika-rwth-aachen/acdc GitHub Wiki
You will now get some hands-on experience with inverse sensor models that create occupancy grid maps from lidar point clouds. In this task, you will complete an algorithm for a geometric inverse sensor model and in the next tasks you will train and use a deep learning-based model.
You will
- start multiple ROS nodes using a launch file to run and visualize a geometric inverse sensor model using recorded lidar sensor data from a Rosbag,
- learn how to use an existing ROS package to separate ground from obstacle points in the lidar point cloud and
- implement a simple geometric inverse sensor model.
We will use the same ROS environment and sensor data that was already used in the previous object detection task. So, make sure to have the ROS framework set up and the Rosbag containing recorded lidar data at acdc/bag/lidar_campus_melaten.bag. If you skipped the object detection task, download the Rosbag here.
If not running yet, start the Docker container by executing the docker/run.sh script. Open a shell in the container by executing the script again from another terminal. In the container, build the ROS package and source the ROS workspace:
catkin build pointcloud_ogm
source devel/setup.bashStart a roscore in the background and start playing the recorded data:
roscore&
rosbag play --loop ../bag/lidar_campus_melaten.bagYou will see this output in the terminal:
rosuser@******:~/ws/catkin_workspace$ roscore&
[1] 14791
rosuser@******:~/ws/catkin_workspace$ ... logging to /home/rosuser/.ros/log/52caca3c-4495-11ec-82b7-b49691b9ac50/roslaunch-I2102656-linux-14791.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://******:34069/
ros_comm version 1.15.11
...
started core service [/rosout]
rosbag play --loop ../bag/lidar_campus_melaten.bag
[ INFO] [1636816879.584949638]: Opening ../bag/lidar_campus_melaten.bag
Waiting 0.2 seconds after advertising topics... done.
Hit space to toggle paused, or 's' to step.
[RUNNING] Bag Time: 1580916332.230592 Duration: 0.820823 / 119.955245Open another shell in the running container by executing the docker/run.sh script again from another terminal window. In the container, source the workspace and execute the launch file that starts the geometric inverse sensor model:
source devel/setup.bash
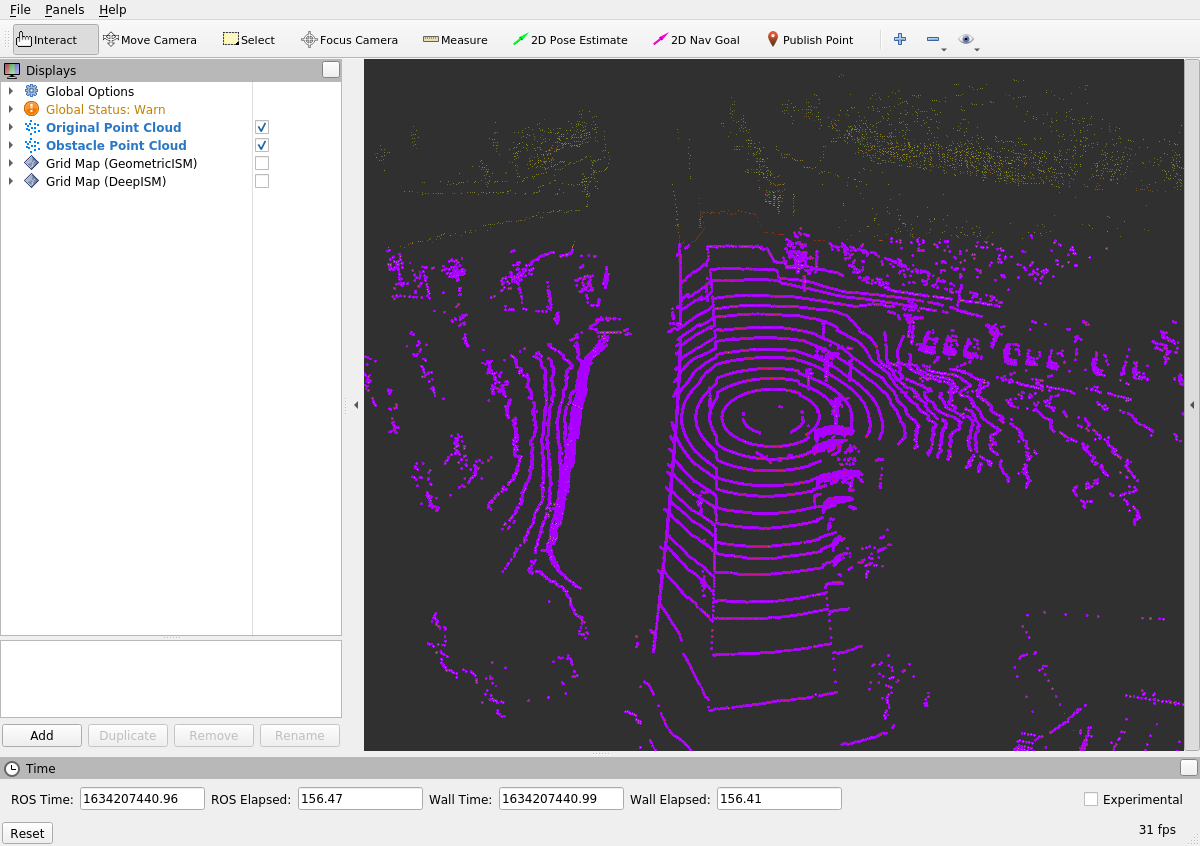
roslaunch pointcloud_ogm GeometricISM.launchRviz will open and visualize lidar point clouds. The points in the originally recorded point cloud are colored by the intensity of the reflection. A second obstacle point cloud is colored in purple. You can (de-)activate the visualization of the point clouds by (un-)ticking them in the left menu.
The recorded lidar point clouds are published as ROS messages of type sensor_msgs/PointCloud2. Each message contains a set of points where each point is described by multiple fields. In our case each point has the fields x, y and z for the position as well as fields describing the intensity of reflection and number of the vertical sensor ring that detected the reflection.

At first step of the geometric algorithm, we have to extract all ground points from the lidar point cloud. For that, we can use the PassThrough filter that is provided by the PointCloudLibrary. It allows setting parameters to determine which points should be kept in the point cloud. The filter is already launched by the file workshops/section_2/pointcloud_ogm/launch/GeometricISM.launch:
<node pkg="nodelet" type="nodelet" name="GroundExtraction" args="load pcl/PassThrough $(arg nodelet_manager)" output="screen">
<remap from="~input" to="/points2" />
<remap from="~output" to="/points2_obstacles" />
<rosparam>
filter_limit_negative: False
filter_field_name: x
filter_limit_min: -50
filter_limit_max: 50
</rosparam>
</node>The parameters are already set according to the specification in the ROS wiki, but they do not fulfill the task. Your task is now to find a configuration that extracts most ground points from the point cloud but (as far as possible) no obstacle points. After changing the parameters, kill the running launch file by pressing CTRL-C in the terminal and restart it to see the effects.
The ROS nodelet pointcloud_ogm/GeometricISM receives lidar point cloud and shall create occupancy grid maps using a geometric inverse sensor model and a binary Bayes filter. You can find the code in the file workshops/section_2/pointcloud_ogm/src/GeometricISM.src. The following steps are performed by the code:
- A point cloud is received and the
messageCallback()method is executed.- A new grid map is initialized with occupancy probability of all cells set to
0.5(or50%). - All points in the point cloud are evaluated sequentially
- A line is formed from each point to the sensor.
- The inverse sensor model determines occupancy probabilities of all grid cells on this line.
- A binary Bayes filter is used to combine the occupancy probabilities derived from the inverse sensor model with the previous state of the grid map.
- The complete measurement grid map is published and can be visualized in Rviz.
- A new grid map is initialized with occupancy probability of all cells set to
The following code iterates over all cells on the line between a reflection point and the sensor. The current occupancy probability of the cell can be accessed with the variable occupancy_probability. A binary Bayes filter combines this value with the occupancy probability derived by the inverse sensor model p_ism. The developer has already added comment describing the desired behavior but you will have to add the code for this simple inverse sensor model in the marked section.
int cell = 0;
for (grid_map::LineIterator iterator(grid_map_measurement, start_position, end_position); !iterator.isPastEnd(); ++iterator) {
auto& occupancy_probability = grid_map_measurement.at("occupancy_probability", *iterator);
/* inverse sensor model:
- cell containing reflection point: 90% occupancy probability
- next two cells towards sensor: 80%, 50% occupancy probability
- remaining cells towards sensor: 10% occupancy probability
*/
double p_ism;
// TASK 2 BEGIN
// ADD YOUR CODE HERE...
// TASK 2 END
// combine probability from ism with previous probability in cell using binary Bayes filter
occupancy_probability = (p_ism*occupancy_probability) /
(p_ism*occupancy_probability + (1-p_ism)*(1-occupancy_probability));
cell++;
}Once you have added your code, compile the ros workspace and restart the launch file. Enable the checkbox next to "Grid Map (GeometricISM)" in the Rviz window to see the published occupancy grid maps.
catkin build pointcloud_ogm
roslaunch pointcloud_ogm GeometricISM.launch- You have learned how to use a filter from the PointCloudLibrary to preprocess point clouds.
- You wrote an algorithm for a simple geometric inverse sensor model to create occupancy grid maps from point clouds.
- You should notice that this approach has some noticeable deficiancies.
- In the next Python task, you will train a neural network to perform occupancy grid mapping from lidar point clouds
