Repository_Layout - RethinkRobotics/sdk-docs GitHub Wiki
Rethink Robotics Repository Layout
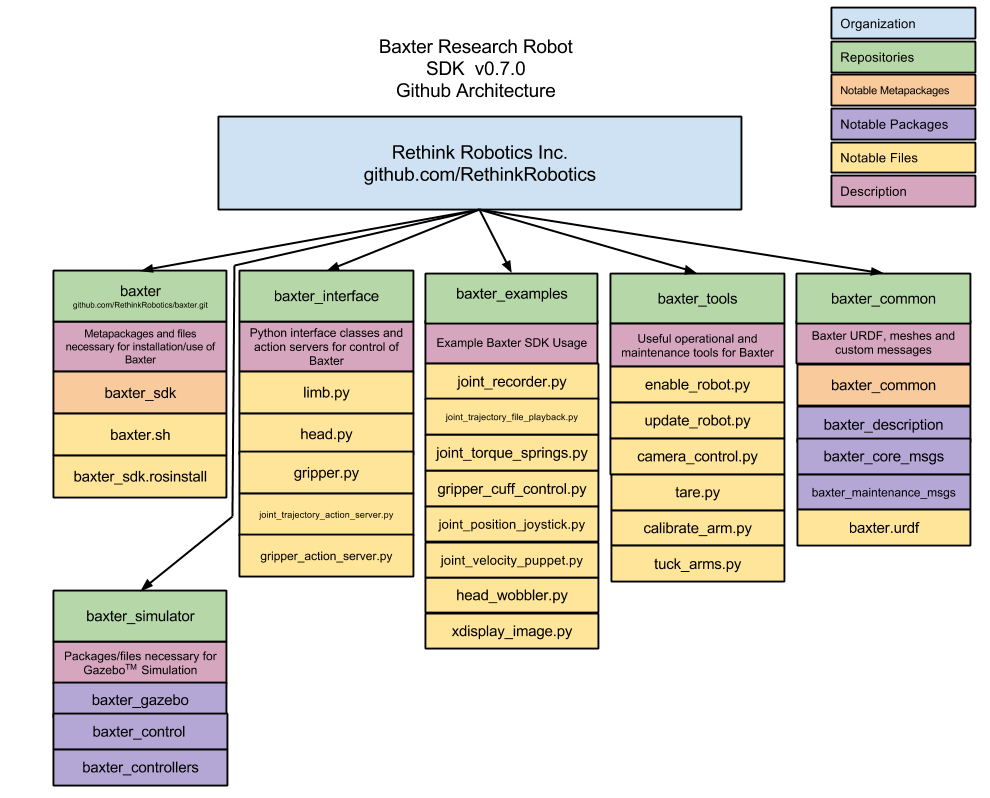
Repository Visualization
Repository Descriptions
baxter
This repository contains metapackages and files for installation/use of the Baxter SDK. These include the baxter_sdk metapackage which contains all of the Baxter SDK packages. Also included in this repository are rosinstall files for ease of installation, and baxter.sh, a bash script designed to help users easily setup their ROS environment as quickly as possible for use with Baxter.
baxter_interface
Python interface classes and action servers for control of Baxter. These python modules extract the direct ROS communication with the robot allowing users to easily program Baxter without having intimate knowledge with ROS. Also included in this repository is the joint trajectory and gripper action servers. These are standard action servers for use with popular ROS tools such as MoveIt!
baxter_tools
Useful operational and maintenance tools for use with Baxter. These scripts prove useful for every day use (robot enable/disable, camera control) and maintenance tasks (tare, calibrate, update robot software).