Understanding MechanumDrive - MDHSRobotics/TeamWiki GitHub Wiki
Polarity
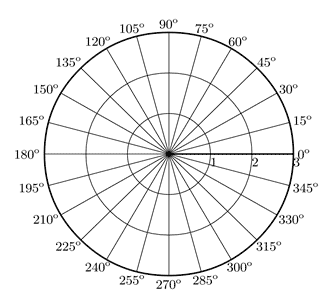
A system of coordinates in which the location of a point is determined by its distance from a fixed point at the center of the coordinate space (called the pole), and by the measurement of the angle formed by a fixed line (the polar axis, corresponding to the x-axis in Cartesian coordinates) and a line from the pole through the given point. The polar coordinates of a point are given as (r, θ), where r is the distance of the point from the pole, and θ is the measure of the angle.
Polar Code Variable Explanation
| Motion | Magnitude | Direction | Rotation |
|---|---|---|---|
| 1/2 Front | 1/2 | Forward | X |
| 1/2 Reverse | -1/2 | Forward | X |
| 1/2 Right | 1/2 | Reverse | X |
| 1/2 Left | -1/2 | Reverse | X |
| 1/2 Rotate (45) | N/A | N/A | ✓ |
Cartesian
Numbers that indicate the location of a point relative to a fixed reference point (the origin), being its shortest (perpendicular) distances from two fixed axes (or three planes defined by three fixed axes) that intersect at right angles at the origin.
