Basic Electrical Components and Wiring Diagram - MDHSRobotics/TeamWiki GitHub Wiki
1. roboRIO
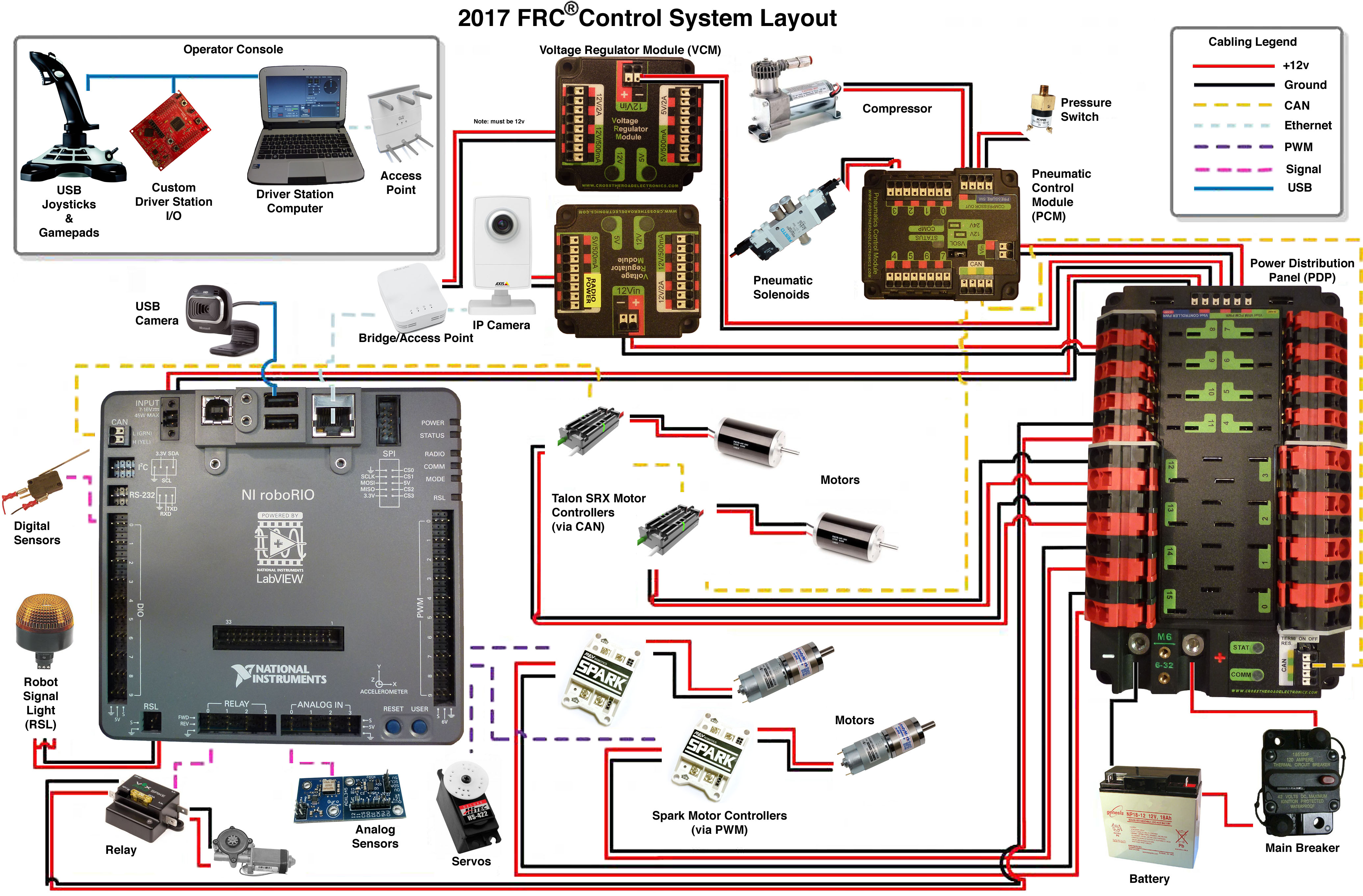
The NI-roboRIO is the main robot controller used for FRC. The roboRIO includes a dual-core ARM Cortex™-A9 processor and FPGA which runs both trusted elements for control and safety as well as team-generated code. Integrated controller I/O includes a variety of communication protocols (Ethernet, USB, CAN, SPI, I2C, and serial) as well as PWM, servo, digital I/O, and analog I/O channels used to connect to robot peripherals for sensing and control.The roboRIO should connect to the dedicated 12V port on the Power Distribution Panel for power. Wired communication is available via USB or Ethernet.
Simple Guide to the roboRIO (https://www.youtube.com/watch?v=8j4GSG-iNUU).
2. Power Distribution Panel
The Power Distribution Panel(PDP) is designed to distribute power from a 12VDC battery to various robot components through auto-resetting circuit breakers and a small number of special function fused connections. The PDP provides 8 output pairs rated for 40A continuous current and 8 pairs rated for 30A continuous current. The PDP provides dedicated 12V connectors for the roboRIO, as well as connectors for the Voltage Regulator Module and Pneumatics Control Module. It also includes a CAN interface for logging current, temperature, and battery voltage.
Simple Guide to the Power Distribution Panel (https://www.youtube.com/watch?v=XmK1LK9jXnU).
3. Pneumatics Control Module (PCM)
The PCM is a device that contains all of the inputs and outputs required to operate 12V or 24V pneumatic solenoids and the on board compressor. The PCM is enabled/disabled by the roboRIO over the CAN interface. The PCM contains an input for the pressure sensor and will control the compressor automatically when the robot is enabled and a solenoid has been created in the code. The device also collects diagnostic information such as solenoid states, pressure switch state, and compressor state. The module includes diagnostic LED’s for both CAN and the individual solenoid channels.
4. Voltage Regulator Module (VRM)
The VRM is an independent module that is powered by 12 volts. The device is wired to a dedicated connector on the PDP. The module has multiple regulated 12V and 5V outputs. The purpose of the VRM is to provide regulated power for the robot radio, custom circuits, and IP vision cameras. Note: The two connector pairs associated with each label have a combined rating of what the label indicates (e.g. 5V/500mA total for both pairs not for each pair). The 12V/2A limit is a peak rating, the supply should not be loaded with more than 1.5A continuous current draw.
5. Motor Controllers
-
Talon
The Talon Motor Controller is a variable speed motor controller and it is controlled over the PWM interface. The Talon should be connected to a PWM output of the roboRIO and powered from the Power Distribution Panel.
-
Talon SRX
The Talon SRX motor controller is a CAN-enabled "smart motor controller" and it can be controlled over the CAN bus or PWM interface. When using the CAN bus control, this device can take inputs from limit switches and potentiometers, encoders, or similar sensors in order to perform advanced control such as limiting or PID(F) closed loop control on the device.
-
Victor SP
The Victor SP motor controller is a PWM motor controller and it has two modes, Brake and Coast, that can be switched by pushing the B/C CAL button at any time.
6. Circuit Breaker
-
120A Circuit Breaker
The 120A Main Circuit Breaker serves two roles on the robot: the main robot power switch and a protection device for downstream robot wiring and components. The 120A circuit breaker is wired to the positive terminals of the robot battery and Power Distribution boards.
-
Snap Action Circuit Breaker
The Snap Action circuit breakers, MX5-A40 and VB3 series, are used with the Power Distribution Panel to limit current to branch circuits. The MX5-A40 40A MAXI style circuit breaker is used with the larger channels on the Power Distribution Panel to power loads which draw current up to 40A continuous. The VB3 series are used with the smaller channels on the PDP to power circuits drawing current of 30A or less continuous.
7. Bridge/Access Point
Either the OpenMesh OM5P-AN or OpenMesh OM5P-AC wireless radio is used as the robot radio to provide wireless communication functionality to the robot. The device can be configured as an Access Point for direct connection of a laptop for use at home. It can also be configured as a bridge for use on the field. The robot radio should be powered by one of the 12V outputs on the VRM and connected to the roboRIO controller over Ethernet.