Glider Models - Field-Robotics-Lab/dave GitHub Wiki
Static examples to illustrate visual models
Underwater gliders
The following launch file starts the ocean world and adds each of the three gliders: Slocum, hybrid and wave.
roslaunch dave_demo_launch dave_gliders_visual_demo.launch paused:=true
Alternatively, use this launch file which has the same functionality, but spawns the gliders closer together for ease of GUI navigation:
roslaunch dave_robot_launch glider_collection.launch paused:=true
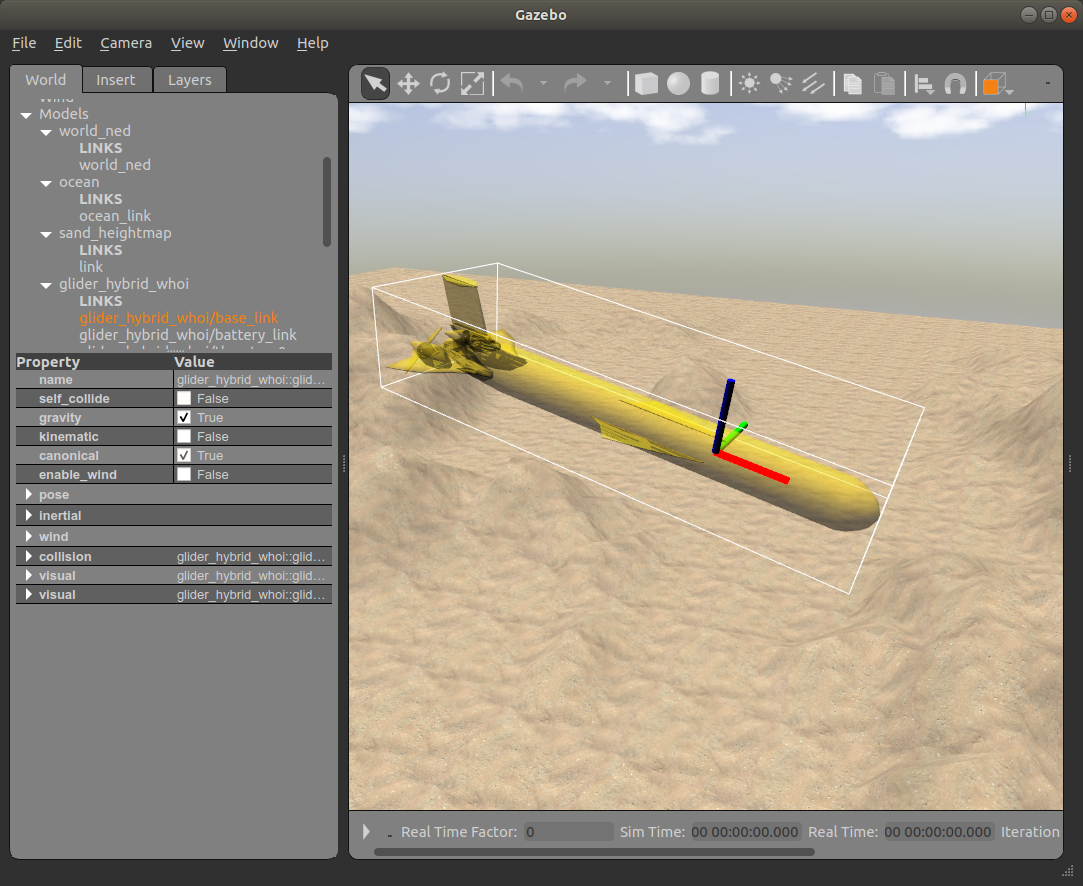
To see each glider, expand the Models on the left side panel of the Gazebo window and right click the glider name and click Move To

This command launches an example ocean floor and loads three gliders into the simulation world in the Gazebo. It is meant to launch with a paused flag since the hydrodynamics of the wave glider is not developed yet. It's mainly to demonstrate the visual of the three gliders.
If you want to try the newly developed physics engine of the glider dynamics, please visit https://github.com/Field-Robotics-Lab/glider_hybrid_whoi
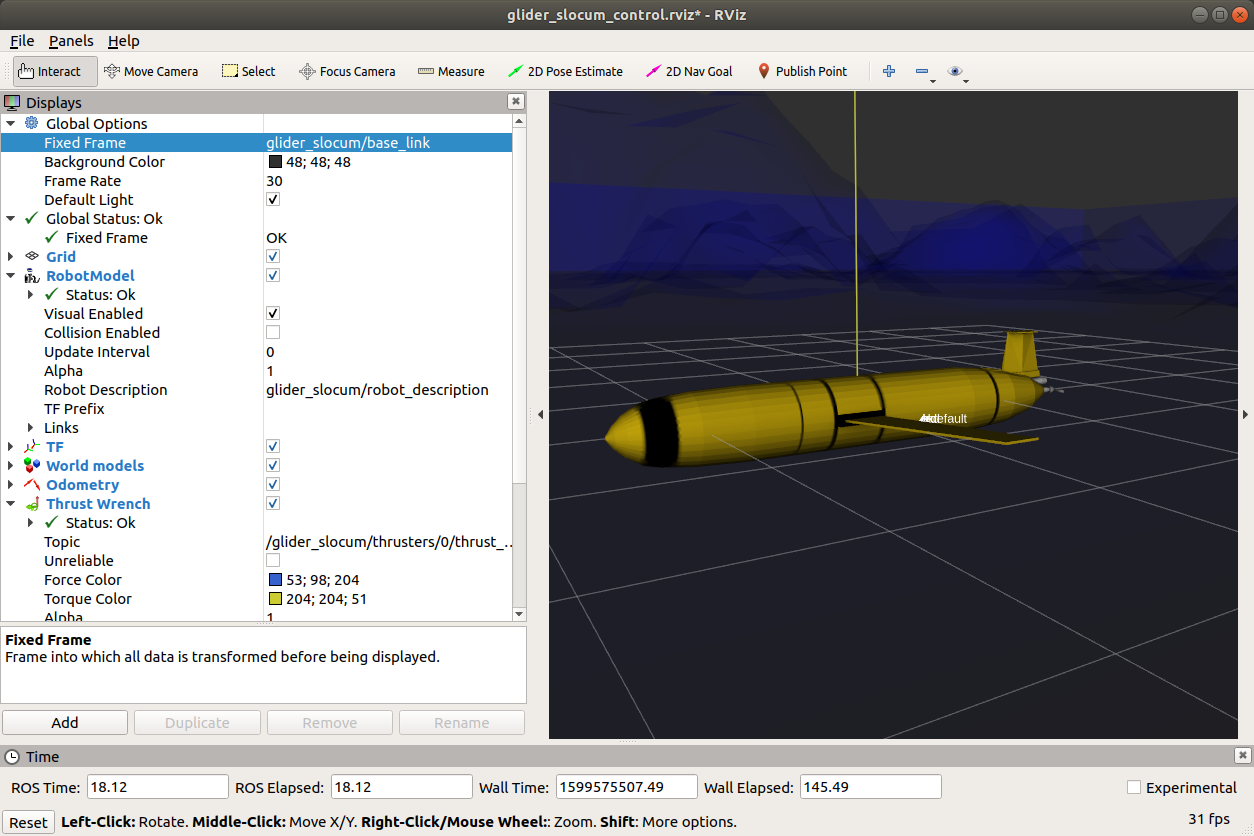
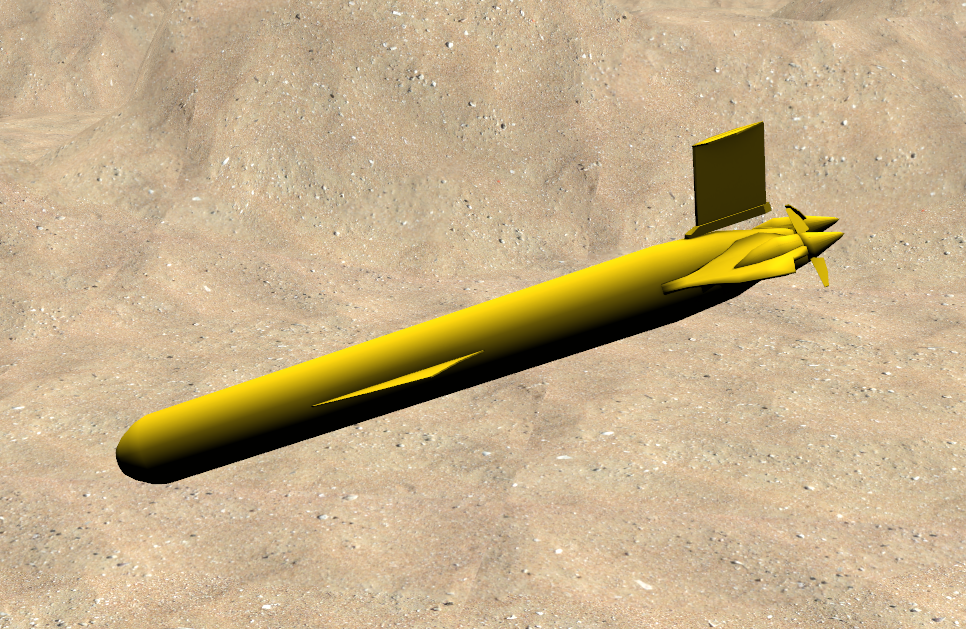
Slocum glider
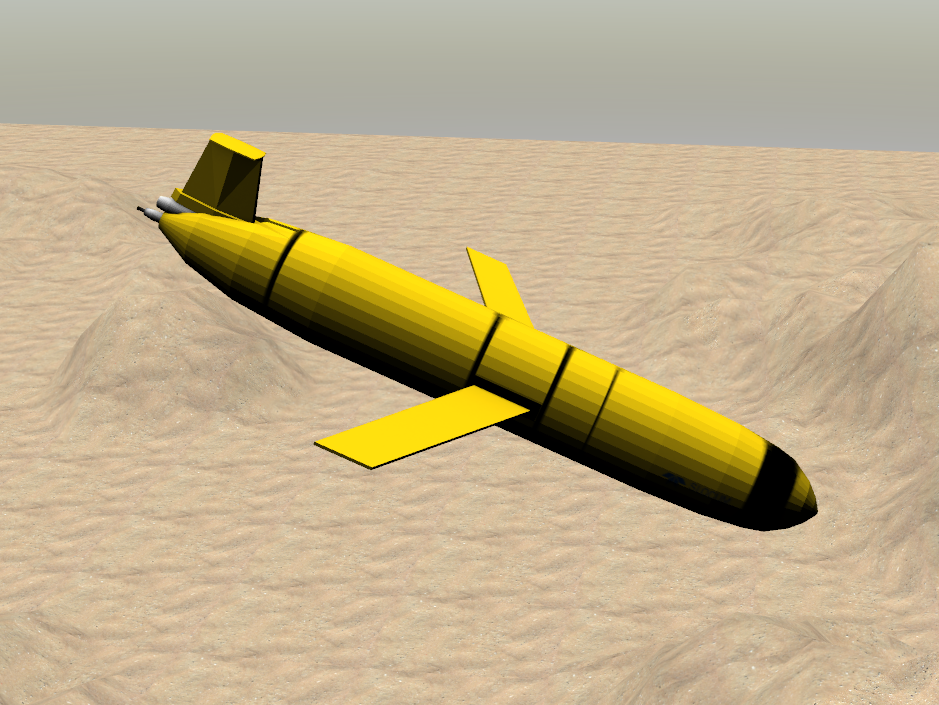
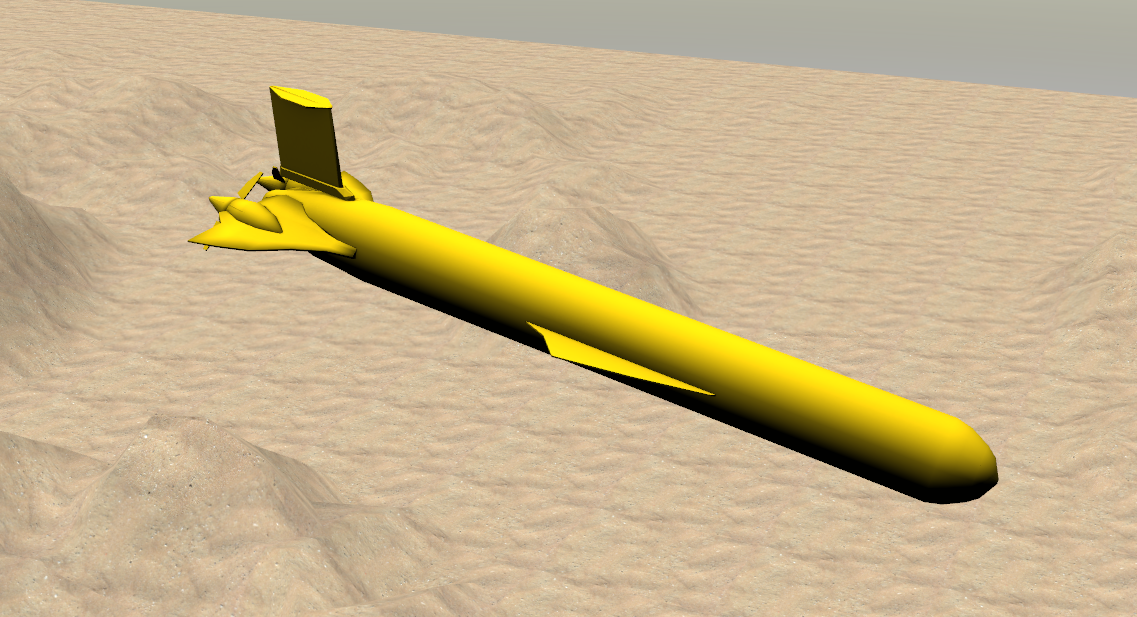
WHOI hybrid glider
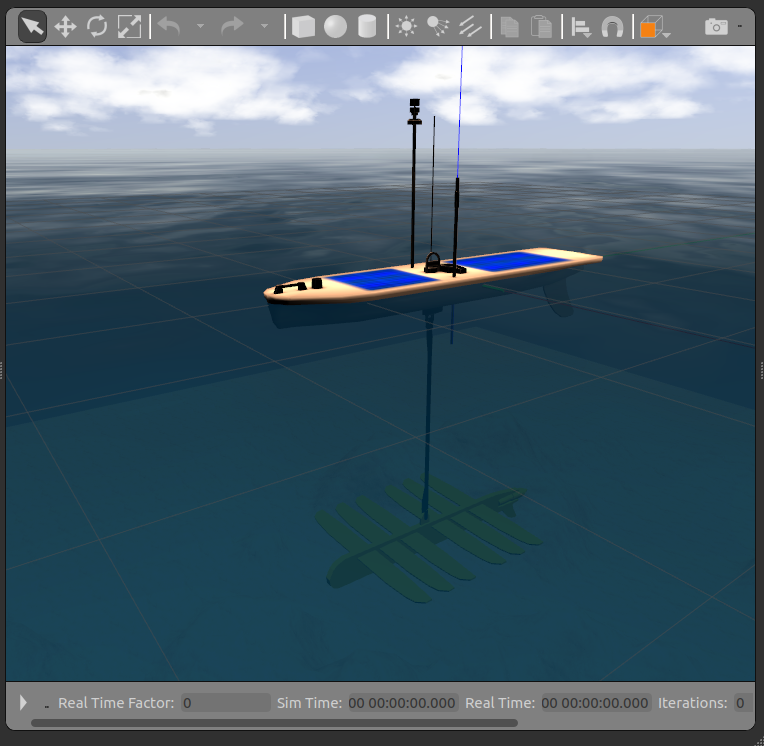
Wave glider