esp32 programmer - tamlablinz/learn-esp32 GitHub Wiki
ESP 32 VIA WROOOM 32 DOWNLOADER
We will program ESP32 chips directly:

with a programmer like this:
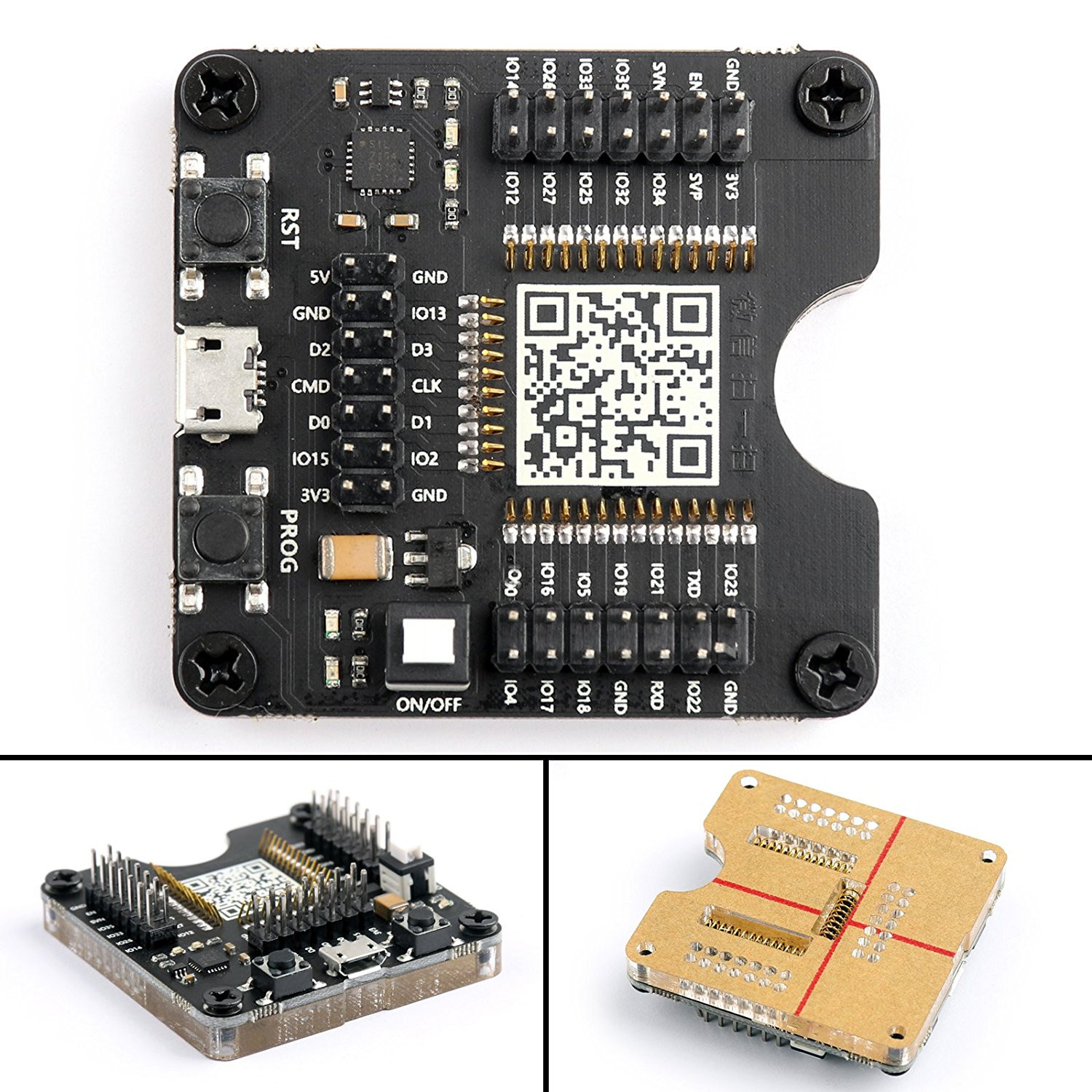
-
download usb to uart drivers for CP2104 from https://www.silabs.com/products/development-tools/software/usb-to-uart-bridge-vcp-drivers
-
in Arduino select board Firebeetle-ESP32
-
upload a test sketch
PINOUT I2C
When using the ESP32 with the Arduino IDE, you should use the ESP32 I2C default pins (supported by the Wire library):
GPIO 21 (SDA)
GPIO 22 (SCL)
Example of complete code for WROOM with Wifi, OSC, I2C and webserver from the embodied gestures project (pins can be differently labeled to other kits!):
#include <WiFi.h>
#include <WiFiUdp.h>
#include <OSCMessage.h>
#include <Wire.h>
#include <Adafruit_BNO055.h>
#include <utility/imumaths.h>
#include <Adafruit_Sensor.h>
/* Set the delay between fresh samples */
#define BNO055_SAMPLERATE_DELAY_MS (5)
Adafruit_BNO055 bno = Adafruit_BNO055();
// WiFi network name and password:
const char * networkName = "embodiedgestures";
const char * networkPswd = "goodman1";
//IP address to send UDP data to:
// either use the ip address of the server or
// a network broadcast address
const IPAddress udpAddress(192, 168, 0, 127);
const int udpPort = 44444;
//Are we currently connected?
boolean connected = false;
//The udp library class
WiFiUDP udp;
int touchValue = 0;
int fsr1 =0;
int fsr2 = 0;
OSCMessage msg_start("/esp/millis/start");
OSCMessage msg_touch("/esp/touch");
OSCMessage msg_orientation("/esp/orientation");
OSCMessage msg_accel("/esp/accel");
OSCMessage msg_fsr("/esp/fsr");
OSCMessage msg_end("/esp/millis/end");
imu::Vector<3> euler;
imu::Vector<3> accel;
bool registered = false;
WiFiServer server(80);
bool bno_error = false;
void setup(){
// Initialize hardware serial:
Serial.begin(115200);
//Wire.begin(4, 15); //Wire.begin(SDA, SCL);
/* Initialise the BNO055 orientation sensor */
if(!bno.begin())
{
/* There was a problem detecting the BNO055 ... check your connections */
Serial.print("Ooops, no BNO055 detected ... Check your wiring or I2C ADDR!");
bno_error = true;
//while(1);
}
/* Display the current temperature */
if(!bno_error){
int8_t temp = bno.getTemp();
Serial.print("Current Temperature: ");
Serial.print(temp);
Serial.println(" C");
Serial.println("");
bno.setExtCrystalUse(true);
Serial.println("Calibration status values: 0=uncalibrated, 3=fully calibrated");
}
//Connect to the WiFi network
connectToWiFi(networkName, networkPswd);
}
void loop(){
wifiserver();
if(connected){
//Send a packet
fsr1 = analogRead(34); // read the input on analog pin 15:
//Serial.print("fsr1: ");
//Serial.println(fsr1); // print out the value you read:
fsr2 = analogRead(35); // read the input on analog pin 15:
//Serial.print("fsr2: ");
//Serial.println(fsr2); // print out the value you read:
//touchValue = touchRead(T2); //GPIO 15
//Serial.print("touch: ");
//Serial.print(touchValue);
///Serial.println("");
if(!bno_error){
euler = bno.getVector(Adafruit_BNO055::VECTOR_EULER);
accel = bno.getVector(Adafruit_BNO055::VECTOR_ACCELEROMETER);
}
/* Display the floating point data */
//Serial.print("X: ");
//Serial.print(euler.x());
//Serial.print(" Y: ");
//Serial.print(euler.y());
//Serial.print(" Z: ");
//Serial.print(euler.z());
//Serial.print("\t\t");
//OSC send
msg_start.add((unsigned int) millis());
udp.beginPacket(udpAddress, udpPort);
msg_start.send(udp);
udp.endPacket();
msg_start.empty();
/*
msg_touch.add((float) touchValue);
udp.beginPacket(udpAddress, udpPort);
msg_touch.send(udp);
udp.endPacket();
msg_touch.empty();
*/
msg_fsr.add((float) fsr1);
msg_fsr.add((float) fsr2);
udp.beginPacket(udpAddress, udpPort);
msg_fsr.send(udp);
udp.endPacket();
msg_fsr.empty();
if(!bno_error){
msg_orientation.add((float) euler.x());
msg_orientation.add((float) euler.y());
msg_orientation.add((float) euler.z());
udp.beginPacket(udpAddress, udpPort);
msg_orientation.send(udp);
udp.endPacket();
msg_orientation.empty();
msg_accel.add((float) accel.x());
msg_accel.add((float) accel.y());
msg_accel.add((float) accel.z());
udp.beginPacket(udpAddress, udpPort);
msg_accel.send(udp);
udp.endPacket();
msg_accel.empty();
}
msg_end.add((unsigned int) millis());
udp.beginPacket(udpAddress, udpPort);
msg_end.send(udp);
udp.endPacket();
msg_end.empty();
}
//Wait for 25ms
delay(25);
}
void connectToWiFi(const char * ssid, const char * pwd){
Serial.println("Connecting to WiFi network: " + String(ssid));
// delete old config
WiFi.disconnect(true);
//register event handler
if(!registered){
registered = true;
WiFi.onEvent(WiFiEvent);
}
//Initiate connection
WiFi.begin(ssid, pwd);
Serial.println("Waiting for WIFI connection...");
//initiate server
server.begin();
}
//wifi event handler
void WiFiEvent(WiFiEvent_t event){
switch(event) {
case SYSTEM_EVENT_STA_GOT_IP:
//When connected set
Serial.print("WiFi connected! IP address: ");
Serial.println(WiFi.localIP());
//initializes the UDP state
//This initializes the transfer buffer
udp.begin(WiFi.localIP(),udpPort);
connected = true;
break;
case SYSTEM_EVENT_STA_DISCONNECTED:
Serial.println("WiFi lost connection");
connected = false;
Serial.println("trying to reconnect");
WiFi.disconnect(true);
Serial.println("IP after disconnect");
Serial.println(WiFi.localIP());
//Initiate connection
Serial.println("connect....");
connectToWiFi(networkName, networkPswd);
delay(1000);
break;
}
}
void wifiserver(){
WiFiClient client = server.available(); // listen for incoming clients
if (client) { // if you get a client,
Serial.println("New Client."); // print a message out the serial port
String currentLine = ""; // make a String to hold incoming data from the client
while (client.connected()) { // loop while the client's connected
if (client.available()) { // if there's bytes to read from the client,
char c = client.read(); // read a byte, then
Serial.write(c); // print it out the serial monitor
if (c == '\n') { // if the byte is a newline character
// if the current line is blank, you got two newline characters in a row.
// that's the end of the client HTTP request, so send a response:
if (currentLine.length() == 0) {
// HTTP headers always start with a response code (e.g. HTTP/1.1 200 OK)
// and a content-type so the client knows what's coming, then a blank line:
client.println("HTTP/1.1 200 OK");
client.println("Content-type:text/html");
client.println();
//information first
client.println("Interface C1<br>");
client.println("<br>");
if(bno_error){
client.println("Error in BNO055<br>");
}
client.println("<br>");
// the content of the HTTP response follows the header:
client.print("Click <a href=\"/H\">here</a> to turn the LED on pin 2 off.<br>");
client.print("Click <a href=\"/L\">here</a> to turn the LED on pin 2 on.<br>");
// The HTTP response ends with another blank line:
client.println();
// break out of the while loop:
break;
} else { // if you got a newline, then clear currentLine:
currentLine = "";
}
} else if (c != '\r') { // if you got anything else but a carriage return character,
currentLine += c; // add it to the end of the currentLine
}
// Check to see if the client request was "GET /H" or "GET /L":
if (currentLine.endsWith("GET /H")) {
digitalWrite(2, HIGH); // GET /H turns the LED on
}
if (currentLine.endsWith("GET /L")) {
digitalWrite(2, LOW); // GET /L turns the LED off
}
}
}
// close the connection:
client.stop();
Serial.println("Client Disconnected.");
}
}