Turtlebot3 with ROS2‐Foxy - technologyELTE/Turtlebot3_motion_control_practice GitHub Wiki
Quick Start Guide - ROS2-Foxy with Turtlebot3
Please Follow the following steps to start to communicate with Turtlebot and manually control.
- 3.1 PC Setup
- 3.2 SBC Setup (Raspberry Pi and microSD card Setup)
- 3.3 OpenCR Setup
- 3.5 Turtlebot Bring up
- 3.6 Basic Operation (teleop)
The SLAM (Simultaneous Localization and Mapping) is a technique to draw a map by estimating current location in an arbitrary space. The SLAM is a well-known feature of TurtleBot from its predecessors. The video here shows you how accurately TurtleBot3 can draw a map with its compact and affordable platform.
SLAM Example
- 4.1 Run SLAM Node
- 4.2 Run Teleoperation Node
- 4.4 Save Map
- 4.5 Map File
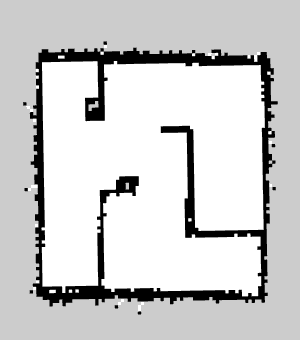
The map uses two-dimensional Occupancy Grid Map (OGM), which is commonly used in ROS. The saved map will look like the figure below, where white area is collision free area while black area is occupied and inaccessible area, and gray area represents the unknown area. This map is used for the Navigation.
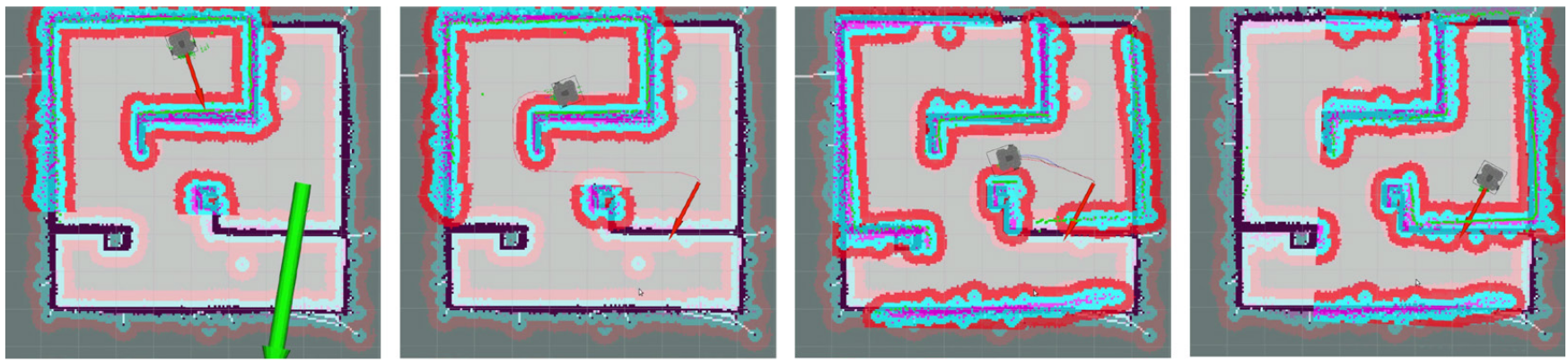
Navigation
The map uses two-dimensional Occupancy Grid Map (OGM), which is commonly used in ROS. The saved map will look like the figure below, where white area is collision free area while black area is occupied and inaccessible area, and gray area represents the unknown area. This map is used for the Navigation.
- 5.1 Run Navigation Node
- 5.2 Estimate Initial Pose
- 5.3 Set Navigation Goal
- 5.4 Tuning Guide