속도 테스트3 No class, Use pid - suakii/oddMotorStudy GitHub Wiki
이번에는 속도를 PID 제어를 통해 테스팅 해봅니다.
이를 통해 원하는 속도에 보다 빠르게 근접하는 것을 확인할 수 있습니다.
/*
* Speed Test wit PID
* class를 사용하지 않는 형태임
* 다음 작업에서는 클래스를 사용한 형태로 변환
* [email protected]
* 아래 코드 중 pid 제어부분과 switch 부분은
* [canDynamix] 모터 속도 테스트 (광주로봇동호회_[깡통로봇연구소]) |작성자 Baram
* 코드를 참고하여 작성하였음을 밝힙니다.
*/
//arduino pid library
//https://playground.arduino.cc/Code/PIDLibrary
#include "src/PID_v1.h"
int pulses, currentPulses;
int motorSpeed;
int encoderA = 2;//아두이노2번핀 -- 모터의 3번핀 Encoder A Phase
int encoderB = 4;//아두이노4번핀 --- 모터의 4번핀 Encoder B Phase
int motorPlus = 5;//아두이노5번핀 -- 모터 드라이버의 A-1A
int motorMinus = 6;//아두이노 6번핀 --모터 드라이버의 A-1B
int state = 0;
unsigned long pre_time = millis();
unsigned long pre_time_log = millis();
unsigned long pre_time_delay = millis();
int pwm = 0;//motor pwm valuf for control
double enc_speed, goal_speed, pwm_output;
double Kp=30, Ki=20, Kd=0;
//PID(&Input, &Output, &Setpoint, Kp, Ki, Kd, Direction)
PID motorPID(&enc_speed, &pwm_output, &goal_speed, Kp, Ki, Kd, DIRECT);
void setup() {
pinMode(encoderA, INPUT_PULLUP);//인코더 값을 읽기 위하여 내부 풀업 저항 사용
pinMode(encoderB, INPUT_PULLUP);
attachInterrupt(0, A_CHANGE, CHANGE);//
analogWrite(motorPlus, 0);//초기 모터 정지
analogWrite(motorMinus, 0);
Serial.begin(115200);//시리얼로 값을 보내기 위한 작업
motorPID.SetSampleTime(10);
motorPID.SetOutputLimits(0, 255);
motorPID.SetMode(AUTOMATIC);
goal_speed = 0;
}
bool pulsesChanged = false;
void loop() {
/*
2초마다 goal speed 를 증가시키고 있음.
*/
switch(state)
{
case 0:
if (millis()-pre_time_delay >= 2000)
{
pre_time_delay = millis();
state = 1;
goal_speed = 5;
}
break;
case 1:
if (millis()-pre_time_delay >= 2000)
{
pre_time_delay = millis();
state = 2;
goal_speed = 10;
}
break;
case 2:
if (millis()-pre_time_delay >= 2000)
{
pre_time_delay = millis();
state = 3;
goal_speed = 15;
}
break;
case 3:
if (millis()-pre_time_delay >= 2000)
{
pre_time_delay = millis();
state = 4;
goal_speed = 20;
}
break;
case 4:
if (millis()-pre_time_delay >= 2000)
{
pre_time_delay = millis();
state = 5;
goal_speed = 25;
}
break;
case 5:
if (millis()-pre_time_delay >= 2000)
{
pre_time_delay = millis();
state = 0;
goal_speed = 0;
}
break;
}
//pid input value
//현재 속도가 다시 pid로 들어감.
enc_speed = motorSpeed;
//pip에서 연산 후 ouput 값을 가지고 실제 모터 컨트롤
if (motorPID.Compute() == true)
{
pwm = constrain(pwm_output, 0, 255);
analogWrite(motorPlus, pwm);//계산된 값을 적용
}
//이전과 다르게 10ms 당 속도를 측정하고 있음.
// pid의 계산시간 역시 10ms로 맞추어져 있음.
if (millis()-pre_time >= 10)
{
pre_time = millis();
motorSpeed = pulses - currentPulses;//속도의 정의를 100ms당 회전수로 정의
currentPulses = pulses;
}
//pwm 적용된 결과를 보기 위하여 100ms 마다 시리얼로 값을 전송
if (millis()-pre_time_log >= 100)
{
pre_time_log = millis();
Serial.print(goal_speed);
Serial.print(" ");
Serial.println(motorSpeed);
}
}
void A_CHANGE() {
if ( digitalRead(encoderB) == 0 ) {
if ( digitalRead(encoderA) == 0 ) {
// A fall, B is low
pulses--; // Moving forward
} else {
// A rise, B is high
pulses++; // Moving reverse
}
} else {
if ( digitalRead(encoderA) == 0 ) {
pulses++; // Moving reverse
} else {
// A rise, B is low
pulses--; // Moving forward
}
}
pulsesChanged = true;
}
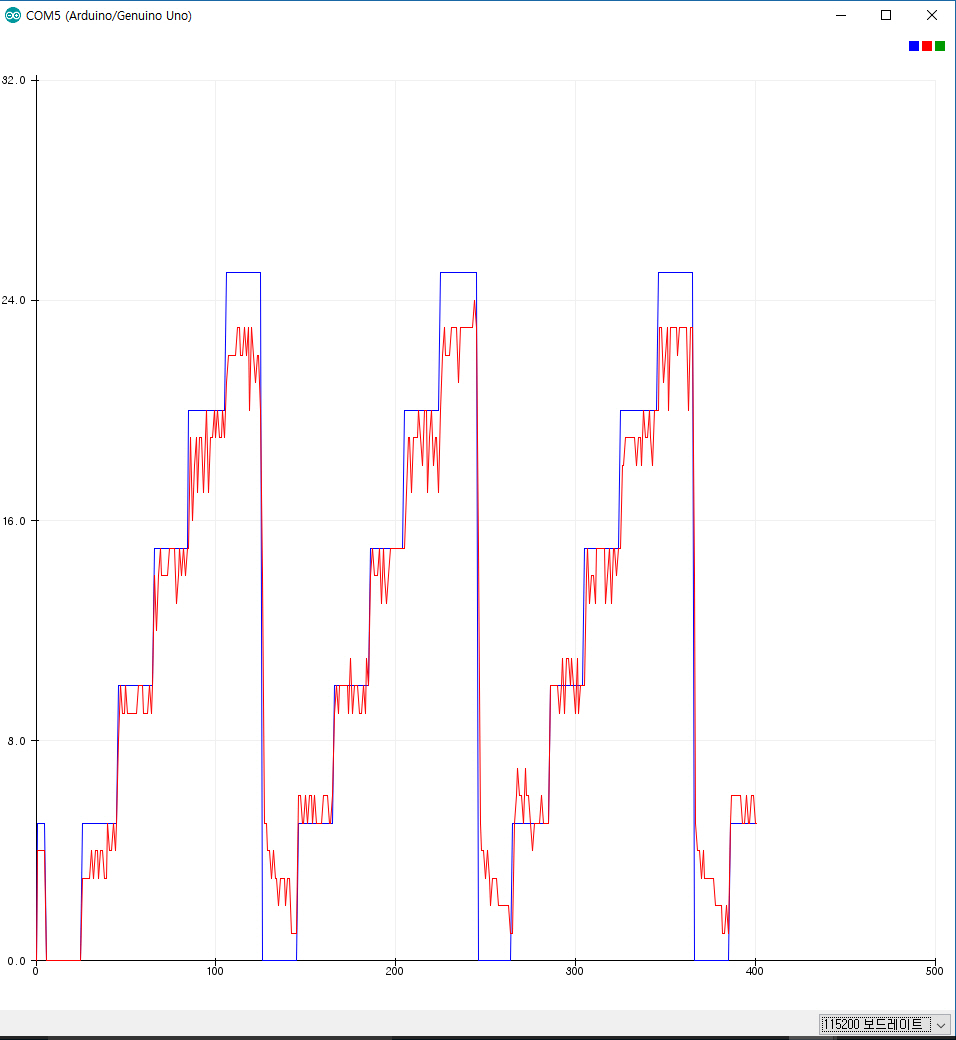
여기서 주목해야할 부분은 코드에서 셋팅된 목표치의 최대값 25가 의미하는 수치입니다.
여기서의 수치는 앞서 언급한되로 25회전/10ms 입니다.
25펄스/10ms = 2500펄스/s 가 되며
모터의 스펙상 2100펄스가 1회전이므로
1.785회전/s
가 되고 분당 RPM은
107.14/m
이 되어 모터의 Micro Metal Geared motor w/Encoder - 6V 105RPM 150:1
스펙의 한꼐치를 넘어가게 되므로 끝까지 올라가지 못하는 것을 볼 수 있습니다.
해당 코드는 https://github.com/suakii/oddMotorStudy/tree/master/Chapter5_SpeedTestNoClassPID/SpeedTestPID_ino
에서 확인할 수 있습니다.