深入了解苹果的动态库链接器dyld - shenchunxing/better-ios-developer GitHub Wiki
1、dyld
1.1 简介
dyld 全名 The dynamic link editor . 它是苹果的动态链接器,是苹果操作系统一个重要组成部分 ,在应用被编译打包成可执行文件格式的 Mach-O 文件之后 ,交由 dyld 负责链接 , 加载程序 。
dyld 是开源的,我们可以通过 官网 下载它的源码来阅读理解它的运作方式,了解系统加载动态库的细节 。
我这里下载的是 dyld-635.2 .
1.2 共享缓存
解读 dyld 有一个必不可少的东西 - 共享缓存 .
由于 iOS 系统中 UIKit / Foundation 等库每个应用都会通过 dyld 加载到内存中 , 因此 , 为了节约空间 , 苹果将这些系统库放在了一个地方 : 动态库共享缓存区 (dyld shared cache) . ( Mac OS 一样有 ) .
因此 , 类似 NSLog 的函数实现地址 , 并不会也不可能会在我们自己的工程的 Mach-O 中 , 那么我们的工程想要调用 NSLog 方法 , 如何能找到其真实的实现地址呢 ?
其流程如下 :
在工程编译时 , 所产生的
Mach-O可执行文件中会预留出一段空间 , 这个空间其实就是符号表 , 存放在_DATA数据段中 ( 因为_DATA段在运行时是可读可写的 )编译时 : 工程中所有引用了共享缓存区中的系统库方法 , 其指向的地址设置成符号地址 , ( 例如工程中有一个
NSLog, 那么编译时就会在Mach-O中创建一个NSLog的符号 , 工程中的NSLog就指向这个符号 )运行时 : 当
dyld将应用进程加载到内存中时 , 根据load commands中列出的需要加载哪些库文件 , 去做绑定的操作 ( 以NSLog为例 ,dyld就会去找到Foundation中NSLog的真实地址写到_DATA段的符号表中NSLog的符号上面 )
这个过程被称为 PIC 技术 . ( Position Independent Code : 位置代码独立 )
了解了系统函数的整个加载过程 , 我们来看 fishhook 的函数名称 :
rebind_symbols :: 重绑定符号 也就简单明了了.
fishhook 原理就是 :
将编译后系统库函数所指向的符号 , 在运行时重绑定到用户指定的函数地址 , 然后将原系统函数的真实地址赋值到用户指定的指针上(为了让用户可以继续调用原函数,实现定制).
2、dyld 加载流程
新建一个空 app 工程 , 在 ViewController 中添加 load 方法 .
+ (void)load{
NSLog(@"load 来了");
}
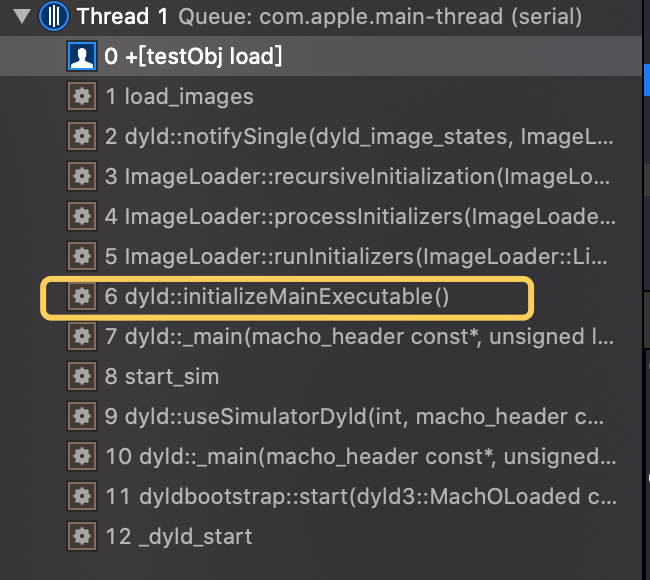
load 方法添加断点 . 运行程序 . 查看函数调用栈 .
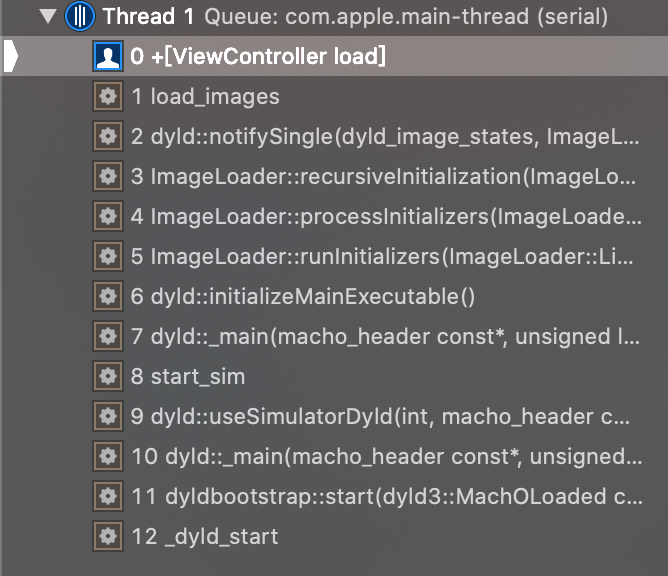
通过 lldb : bt + up / down 指令来到入口 _dyld_start 处 .
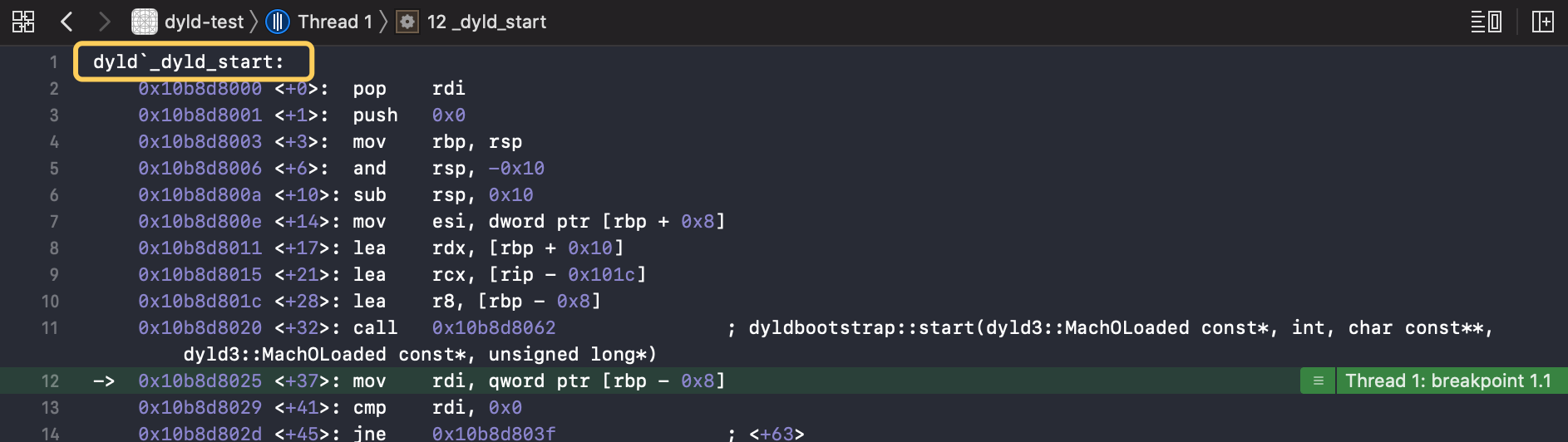
2.1 _dyld_start
上图第 11 行 : call 就是调用函数的指令 , ( 同 bl ) . 这个函数也就是我们 app 开始的地方 .
当我们点开一个应用 , 系统内核会开启一个进程 , 然后由 dyld 开始加载这个可执行文件 .
2.1.1 dyldbootstrap :: start
dyldbootstrap::start 就是指 dyldbootstrap 这个命名空间作用域里的 start 函数 .
来到源码中 , 搜索 dyldbootstrap , 然后找到 start 函数 .
cmd + shift + j 可以定位文件位置
uintptr_t start(const struct macho_header* appsMachHeader, int argc, const char* argv[],
intptr_t slide, const struct macho_header* dyldsMachHeader,
uintptr_t* startGlue)
{
slide = slideOfMainExecutable(dyldsMachHeader);
bool shouldRebase = slide != 0;
#if __has_feature(ptrauth_calls)
shouldRebase = true;
#endif
if ( shouldRebase ) {
rebaseDyld(dyldsMachHeader, slide);
}
mach_init();
const char** envp = &argv[argc+1];
const char** apple = envp;
while(*apple != NULL) { ++apple; }
++apple;
__guard_setup(apple);
#if DYLD_INITIALIZER_SUPPORT
runDyldInitializers(dyldsMachHeader, slide, argc, argv, envp, apple);
#endif
uintptr_t appsSlide = slideOfMainExecutable(appsMachHeader);
return dyld::_main(appsMachHeader, appsSlide, argc, argv, envp, apple, startGlue);
}
这个函数首先有两个参数我们要说明一下 :
1️⃣、
const struct macho_header* appsMachHeader, 这个参数就是Mach-O的header. 关于这个header, Mach-O文件 这篇文章中Mach-O 文件结构里有详细描述 .2️⃣、
intptr_t slide, 这个其实就是 ALSR , 说白了就是通过一个随机值 ( 也就是我们这里的 slide ) 来实现地址空间配置随机加载 .
当某个特定进程,在存储器中所能够使用与控制的地址空间在运行时随机进行分配 , 可以使某些攻击者无法事先获知地址 ,令攻击者难以通过固定地址获取函数或者内存值进行攻击 .
Mac OS X Lion10.7开始所有的应用程序均提供了ASLR支持 .3️⃣、 物理地址 =
ALSR+ 虚拟地址 ( 偏移 ) .
那么接下来 , 这个函数到底做了什么呢 ?
流程如下 :
-
首先 , 根据计算出来的
ASLR的slide来重定向macho. -
初始化 , 允许
dyld使用mach消息传递 . -
栈溢出保护 .
-
初始化完成后调用
dyld的main函数 ,dyld::_main.
2.1.2 dyld::_main
直接点击跳转到 dyld - main 函数中 . 该函数是加载 app 的主要函数.
uintptr_t
_main(const macho_header* mainExecutableMH, uintptr_t mainExecutableSlide,
int argc, const char* argv[], const char* envp[], const char* apple[],
uintptr_t* startGlue)
{
// *函数太长 , 这里就不贴了.*/
}
这个函数主要流程如下 :
2.1.2.1 准备工作
-
1️⃣ : 配置相关环境变量 .
-
2️⃣ : 设置上下文信息
setContext. -
3️⃣ : 检测进程是否受限 , 在上下文中做出对应处理
configureProcessRestrictions, 检测环境变量checkEnvironmentVariables.- 熟悉越狱插件的同学应该都很清楚 , 某些环境变量会直接影响该库是否会被加载 , 有些防护操作就是基于这个原理来做的 . ( 后续更新越狱篇章攻防会详细讲述和演示 )
-
4️⃣ : 根据环境变量配置打印信息 ,
DYLD_PRINT_OPTS与DYLD_PRINT_ENV, 大家可以在如下图中配置玩一玩 .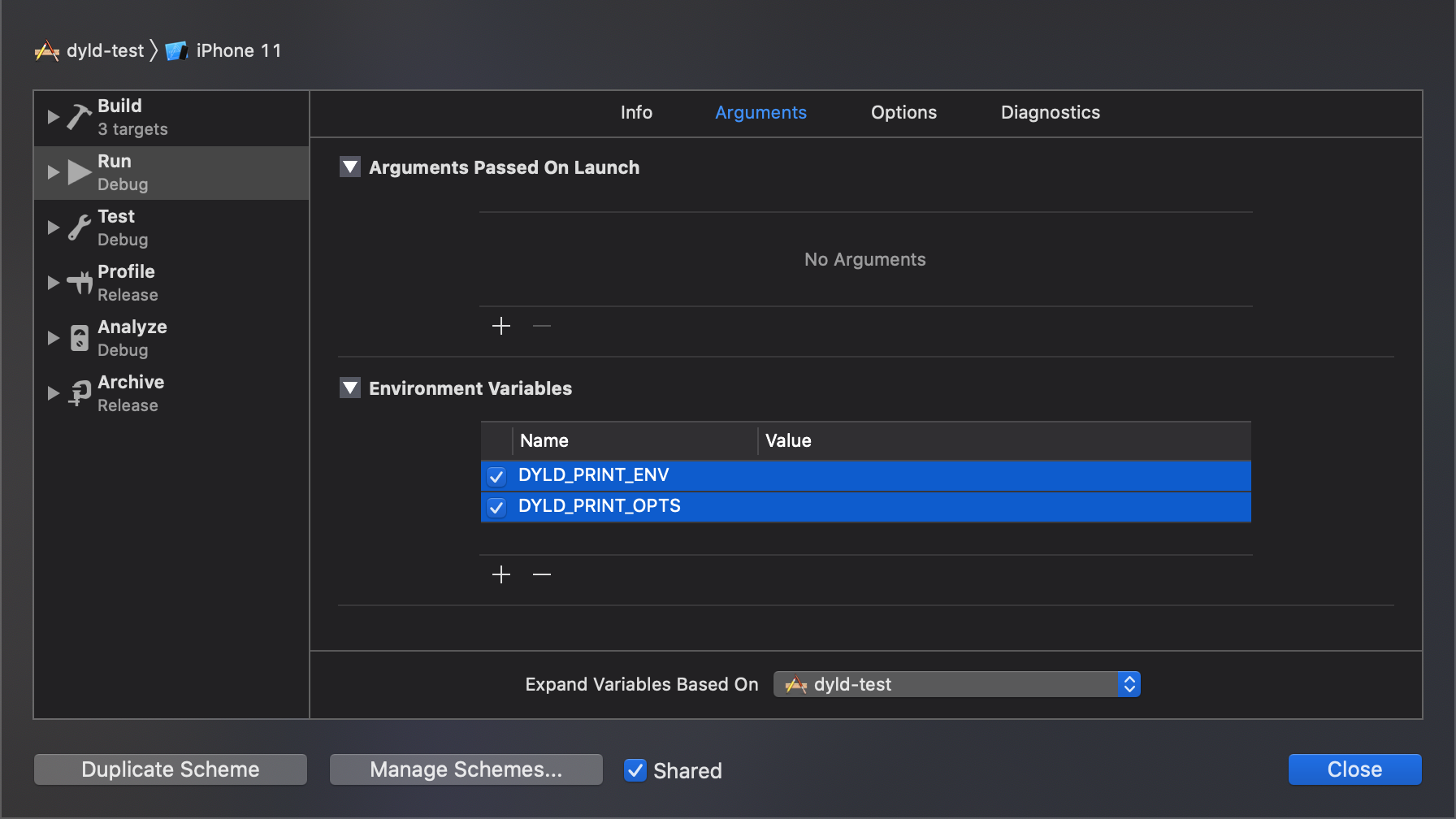
-
5️⃣ : 获取程序架构
getHostInfo.
2.1.2.2 加载共享缓存库
该流程主要步骤如下 :
-
1️⃣ : 检测共享缓存禁用状态
checkSharedRegionDisable. ( iOS 下不会被禁用 ) . -
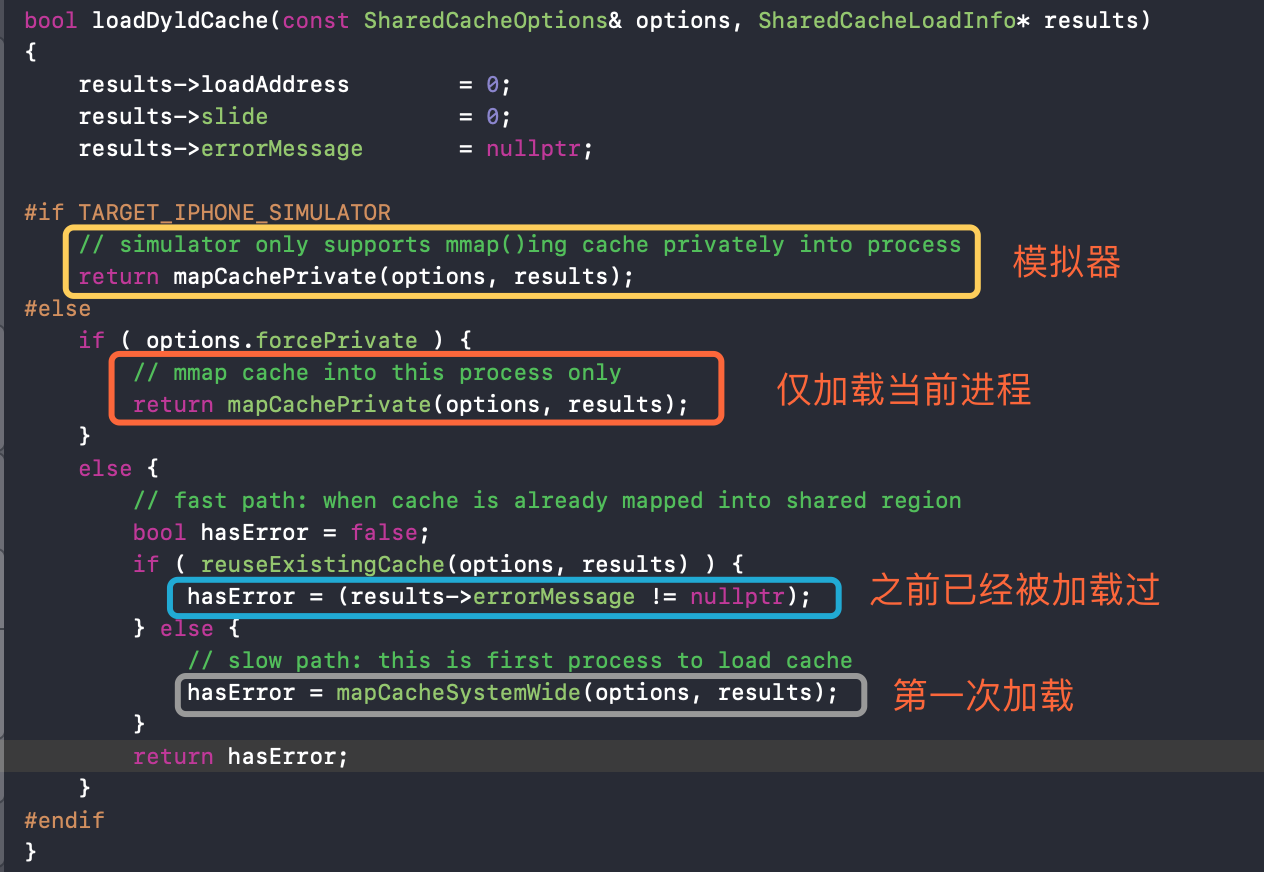
2️⃣ : 加载共享缓存库 ,
mapSharedCache->loadDyldCache.这里加载共享缓存有几种情况 :-
1、仅加载到当前进程
mapCachePrivate, ( 模拟器仅支持加载到当前进程 ) . -
2、共享缓存是第一次被加载 , 就去做加载操作
mapCacheSystemWide. -
3、共享缓存不是第一次被加载 , 那么就不做任何处理 .
-
2.1.2.3 reloadAllImages
sMainExecutable = instantiateFromLoadedImage(mainExecutableMH, mainExecutableSlide, sExecPath);
实例化主程序 , 检测可执行程序格式 .
static ImageLoaderMachO* instantiateFromLoadedImage(const macho_header* mh, uintptr_t slide, const char* path)
{
// try mach-o loader
if ( isCompatibleMachO((const uint8_t*)mh, path) ) {
ImageLoader* image = ImageLoaderMachO::instantiateMainExecutable(mh, slide, path, gLinkContext);
addImage(image);
return (ImageLoaderMachO*)image;
}
throw "main executable not a known format";
}
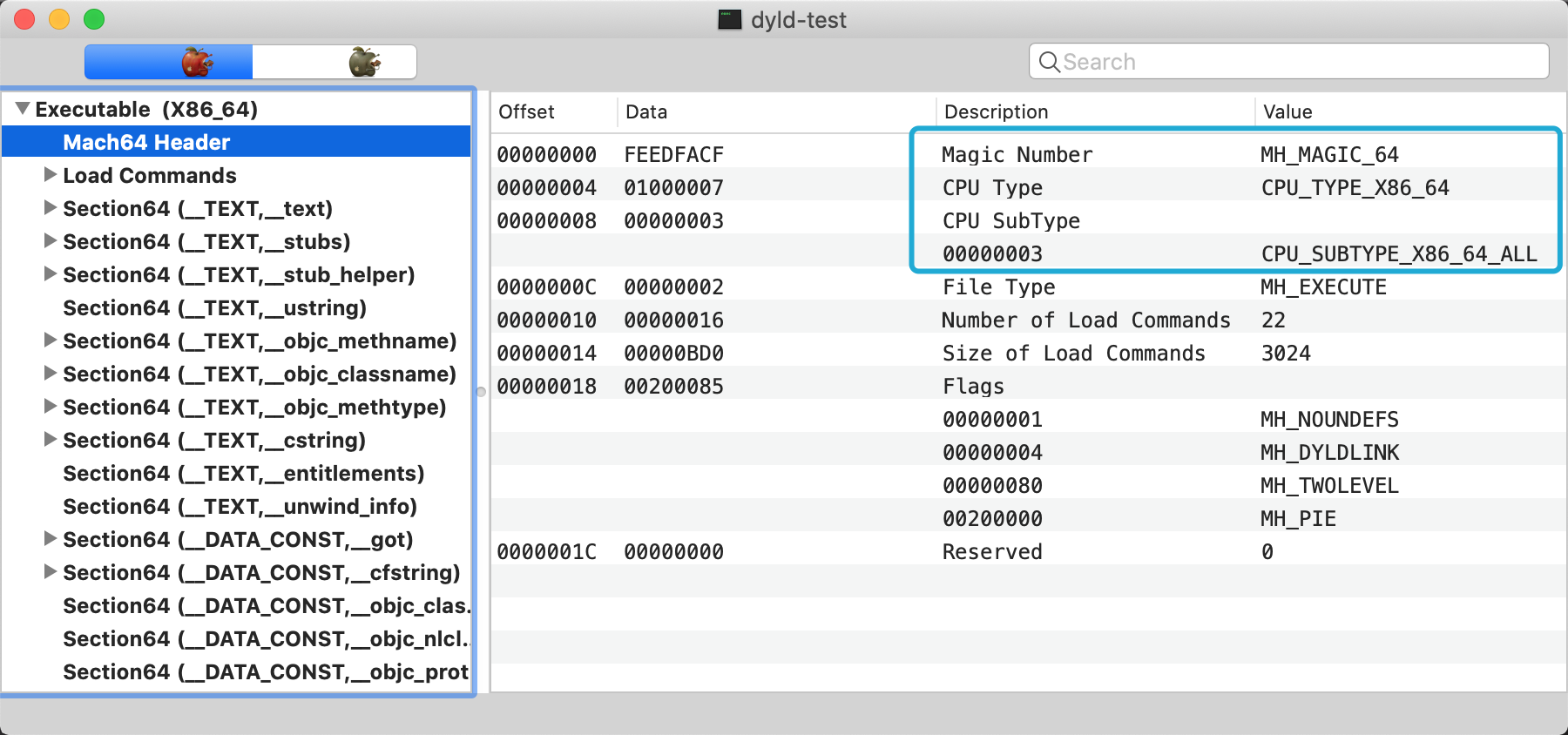
isCompatibleMachO 里就会通过 header 里的 magic , cputype , cpusubtype 去检测是否兼容 .
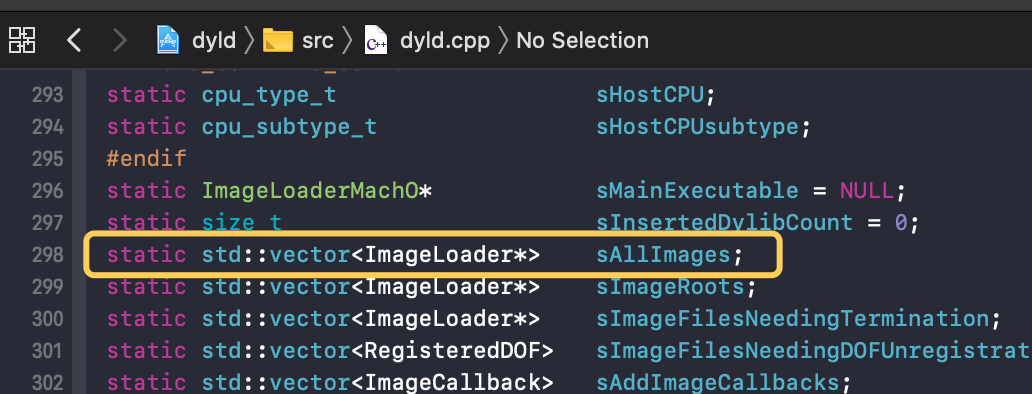
检测通过 , 就会通过 instantiateMainExecutable 实例化这个 image , 并添加到 static std::vector<ImageLoader*> sAllImages; 这个全局的镜像列表中去 , 设置好上下文 .
instantiateMainExecutable 里 , 真正实例化主程序是用 sniffLoadCommands 这个函数去做的 . 有的同学可能对这个函数比较熟悉了 . 我们来稍微看一下 .
还是 ImageLoaderMachO 这个作用域里的 sniffLoadCommands 函数 .
void ImageLoaderMachO::sniffLoadCommands(const macho_header* mh, const char* path, bool inCache, bool* compressed,
unsigned int* segCount, unsigned int* libCount, const LinkContext& context,
const linkedit_data_command** codeSigCmd,
const encryption_info_command** encryptCmd) {
*compressed = false;
*segCount = 0;
*libCount = 0;
*codeSigCmd = NULL;
*encryptCmd = NULL;
/*
...省略掉.
*/
// fSegmentsArrayCount is only 8-bits
if ( *segCount > 255 )
dyld::throwf("malformed mach-o image: more than 255 segments in %s", path);
// fSegmentsArrayCount is only 8-bits
if ( *libCount > 4095 )
dyld::throwf("malformed mach-o image: more than 4095 dependent libraries in %s", path);
if ( needsAddedLibSystemDepency(*libCount, mh) )
*libCount = 1;
}
这个函数就是根据 Load Commands 来加载主程序 .
这里几个参数我们稍微说明下 :
compressed-> 根据LC_DYLD_INFO_ONYL来决定 .segCount段命令数量 , 最大不能超过255个.libCount依赖库数量 ,LC_LOAD_DYLIB (Foundation / UIKit ..), 最大不能超过4095个.codeSigCmd, 应用签名 , 在 应用签名原理及重签名 (重签微信应用实战) 这篇文章中有非常详细的讲述 , 建议读一读 .encryptCmd, 应用加密信息 , ( 我们俗称的应用加壳 , 我们非越狱环境重签名都是需要砸过壳的应用才能调试 , 关于应用的砸壳 , 后续逆向文章越狱篇里会实际操作演练 ) .
经过以上步骤 , 主程序的实例化就已经完成了 .
2.1.2.4 加载插入动态库
if ( sEnv.DYLD_INSERT_LIBRARIES != NULL ) {
for (const char* const* lib = sEnv.DYLD_INSERT_LIBRARIES; *lib != NULL; ++lib)
loadInsertedDylib(*lib);
}
熟悉越狱插件的同学应该很清楚这个机制了 . 根据 DYLD_INSERT_LIBRARIES 环境变量来决定是否需要加载插入的动态库 .
越狱的插件就是基于这个原理来实现只需要下载插件 , 就可以影响到应用 . 有部分防护手段就用到了这个环境变量 ( 后续逆向文章会带着大家自己写一个越狱插件 , 这个很简单 , 然后会讲一讲越狱环境插件如何防护 . ) .
sInsertedDylibCount = sAllImages.size()-1;
记录插入动态库的数量 .
2.1.2.5 链接主程序
// link main executable
gLinkContext.linkingMainExecutable = true;
link(sMainExecutable, sEnv.DYLD_BIND_AT_LAUNCH, true, ImageLoader::RPathChain(NULL, NULL), -1);
sMainExecutable->setNeverUnloadRecursive();
if ( sMainExecutable->forceFlat() ) {
gLinkContext.bindFlat = true;
gLinkContext.prebindUsage = ImageLoader::kUseNoPrebinding;
}
if ( sInsertedDylibCount > 0 ) {
for(unsigned int i=0; i < sInsertedDylibCount; ++i) {
ImageLoader* image = sAllImages[i+1];
link(image, sEnv.DYLD_BIND_AT_LAUNCH, true, ImageLoader::RPathChain(NULL, NULL), -1);
image->setNeverUnloadRecursive();
}
for(unsigned int i=0; i < sInsertedDylibCount; ++i) {
ImageLoader* image = sAllImages[i+1];
image->registerInterposing(gLinkContext);
}
}
点击进入 link 函数 , link 函数中有一系列 recursiveLoadLibraries , recursiveBindWithAccounting -> recursiveBind , 也就是递归进行符号绑定的过程 .
link 函数执行完毕之后 , dyld :: main 会调用 sMainExecutable->weakBind(gLinkContext); 进行弱绑定 , 懒加载绑定 , 也就是说弱绑定一定发生在 其他库链接绑定完成之后 .
绑定的过程就是我们上述 1.2 章节中所讲的共享缓存绑定的过程 .
走到了这里 , 主程序已经实例化完毕 , 但还没有加载 ,
framework已经加载完毕了 , 那讲到这插一句题外话 , 不同framework, 谁先会被加载 ? 其实根据二进制顺序有关 ,Xcode中可以自由调整 .
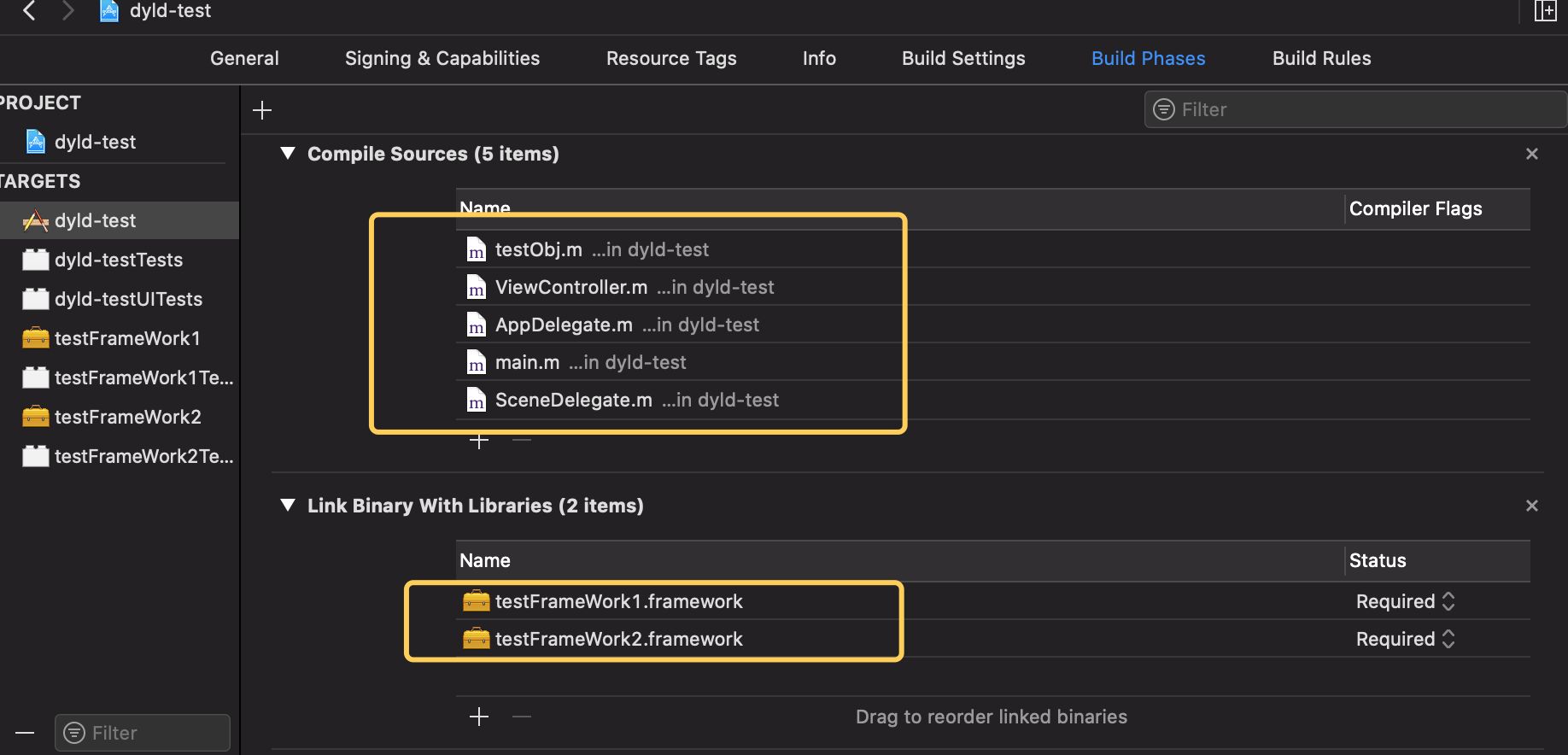
拖动就可以自己调整顺序了 , 编译顺序就会根据这个顺序来 , 同样你可以使用 MachOView 来查看二进制顺序 .
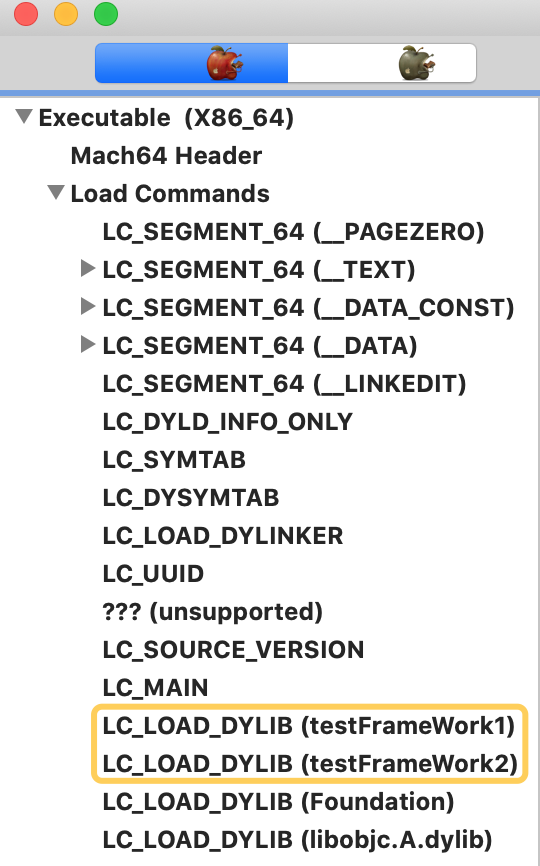
至此 , 配置环境变量 -> 加载共享缓存 -> 实例化主程序 -> 加载动态库 -> 链接动态库 就已经完成了 .
继续往 dyld :: main 下面找 , 我们会看到
initializeMainExecutable();
那么我们回到函数调用栈看下 .
2.1.3 运行主程序
通过查看源码查看 , 结合函数调用栈 , 我们跟进去调用流程 initializeMainExecutable -> runInitializers -> processInitializers -> 递归调用 recursiveInitialization .
到了这里 , 直接点击 进不去了 , 同理 , cmd + shift + o, 搜索 recursiveInitialization . 来到函数实现 , 找到如下代码 :
// let objc know we are about to initialize this image
uint64_t t1 = mach_absolute_time();
fState = dyld_image_state_dependents_initialized;
oldState = fState;
context.notifySingle(dyld_image_state_dependents_initialized, this, &timingInfo);
// initialize this image
bool hasInitializers = this->doInitialization(context);
// let anyone know we finished initializing this image
fState = dyld_image_state_initialized;
oldState = fState;
context.notifySingle(dyld_image_state_initialized, this, NULL);`
调用 notifySingle 函数 .
⚠️ : 重头戏来了 . 根据函数调用栈我们发现 , 下一步是调用 load_images , 可是这个 notifySingle 里并没有找到 load_images 的影子 . 但是我们看到了这么个东西 :
(*sNotifyObjCInit)(image->getRealPath(), image->machHeader());
这是个回调函数的调用 ,
sNotifyObjCInit上面判断了并不会为空 , 那就代表一定是有值的 . 那我们搜索一下sNotifyObjCInit, 看看什么时候被赋的值 .
直接本文件搜索 , 看到如下 :
void registerObjCNotifiers(_dyld_objc_notify_mapped mapped, _dyld_objc_notify_init init, _dyld_objc_notify_unmapped unmapped)
{
// record functions to call
sNotifyObjCMapped = mapped;
sNotifyObjCInit = init;
sNotifyObjCUnmapped = unmapped;
// call 'mapped' function with all images mapped so far
try {
notifyBatchPartial(dyld_image_state_bound, true, NULL, false, true);
}
catch (const char* msg) {
// ignore request to abort during registration
}
// <rdar://problem/32209809> call 'init' function on all images already init'ed (below libSystem)
for (std::vector<ImageLoader*>::iterator it=sAllImages.begin(); it != sAllImages.end(); it++) {
ImageLoader* image = *it;
if ( (image->getState() == dyld_image_state_initialized) && image->notifyObjC() ) {
dyld3::ScopedTimer timer(DBG_DYLD_TIMING_OBJC_INIT, (uint64_t)image->machHeader(), 0, 0);
(*sNotifyObjCInit)(image->getRealPath(), image->machHeader());
}
}
}
也就是说 , 这个函数调用 , 其第二个参数赋值给了 sNotifyObjCInit , 然后在 notifySingle 里被执行 .
那么我们搜索一下 registerObjCNotifiers , 看看其在什么时候被调用的 , 搜索发现 :
void _dyld_objc_notify_register(_dyld_objc_notify_mapped mapped,
_dyld_objc_notify_init init,
_dyld_objc_notify_unmapped unmapped)
{
dyld::registerObjCNotifiers(mapped, init, unmapped);
}
再继续搜索 , 没啥结果了 . 那么怎么办 , 不着急 , 我们来到测试工程里下一个符号断点 _dyld_objc_notify_register , 运行来到断点 , 看函数调用栈 .
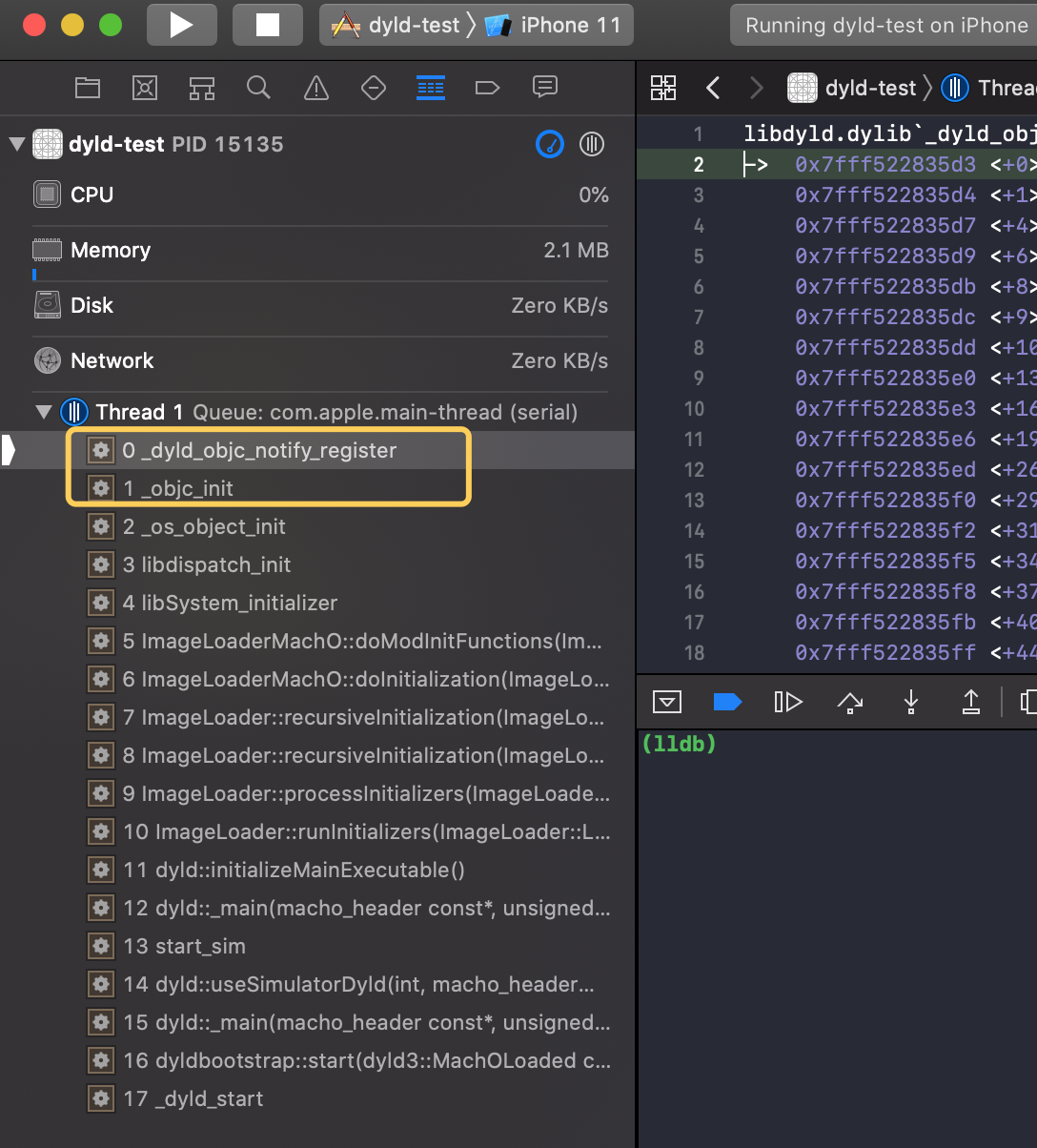
. 至此 , 我们看到的就是 runtime 被加载的整个流程 , 来到 objc 750 的代码中直接搜索 _objc_init .
2.1.4 _objc_init
void _objc_init(void)
{
static bool initialized = false;
if (initialized) return;
initialized = true;
// fixme defer initialization until an objc-using image is found?
environ_init();
tls_init();
static_init();
lock_init();
exception_init();
_dyld_objc_notify_register(&map_images, load_images, unmap_image);
}
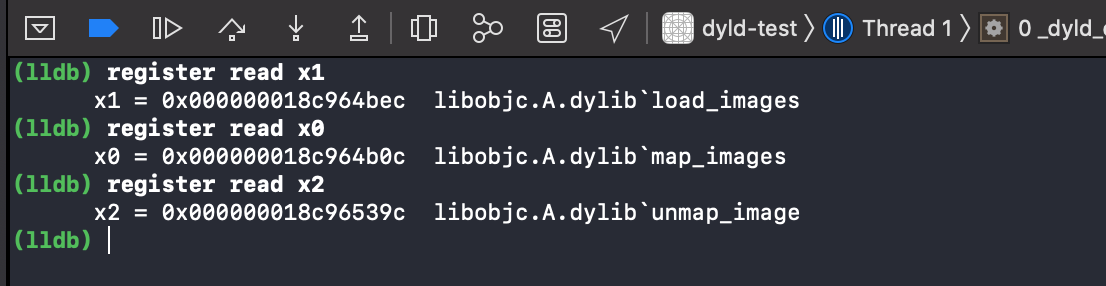
来到这里 , 我们就看到了 _dyld_objc_notify_register 被调用 , 传递了三个参数 , 这三个分别代表 在 分类底层原理详细研究 中我们也有详细讲述过 .
map_images:dyld将image加载进内存时 , 会触发该函数.load_images:dyld初始化image会触发该方法. ( 我们所熟知的load方法也是在此处调用 ) .unmap_image:dyld将image移除时 , 会触发该函数 .
当然 , 你可以通过 lldb 验证一下 .
那么这个 load_images , 就调用了各个类的 load 方法 ( call_load_methods ) . 关于这个请看 分类底层原理详细研究 与 load方法调用机制解析 这两篇文章 .
要声明一下的是 :
那么也就是说 :
- 1️⃣、 当
dyld加载到开始链接主程序的时候 , 递归调用recursiveInitialization函数 .- 2️⃣、 这个函数第一次执行 , 进行
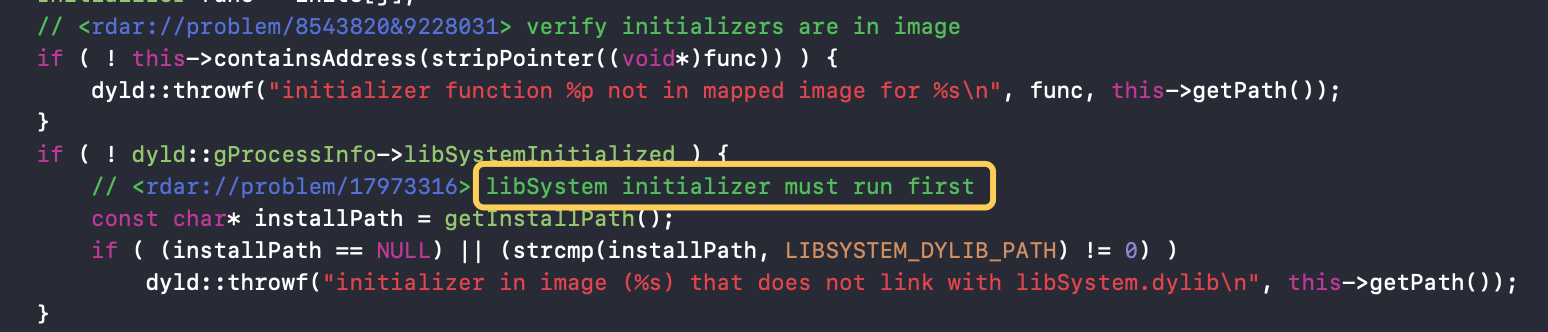
libsystem的初始化 . 会走到doInitialization->doModInitFunctions->libSystemInitialized.- 3️⃣、
Libsystem的初始化 , 它会调用起libdispatch_init,libdispatch的init会调用_os_object_init, 这个函数里面调用了_objc_init.- 4️⃣、
_objc_init中注册并保存了map_images,load_images,unmap_image函数地址.- 5️⃣ : 注册完毕继续回到
recursiveInitialization递归下一次调用 , 例如libobjc, 当libobjc来到recursiveInitialization调用时 , 会触发libsystem调用到_objc_init里注册好的回调函数进行调用 . 就来到了libobjc, 调用load_images.
跟我们上面截图的函数调用栈一模一样 .
2.1.5 doInitialization
dyld 来到 doInitialization 时 ,
bool ImageLoaderMachO::doInitialization(const LinkContext& context)
{
CRSetCrashLogMessage2(this->getPath());
// mach-o has -init and static initializers
doImageInit(context);
doModInitFunctions(context);
CRSetCrashLogMessage2(NULL);
return (fHasDashInit || fHasInitializers);
}
在 doModInitFunctions 中 , 值得一提的是会调用 c++ 的构造方法 .
演示如下 :
打印结果 :
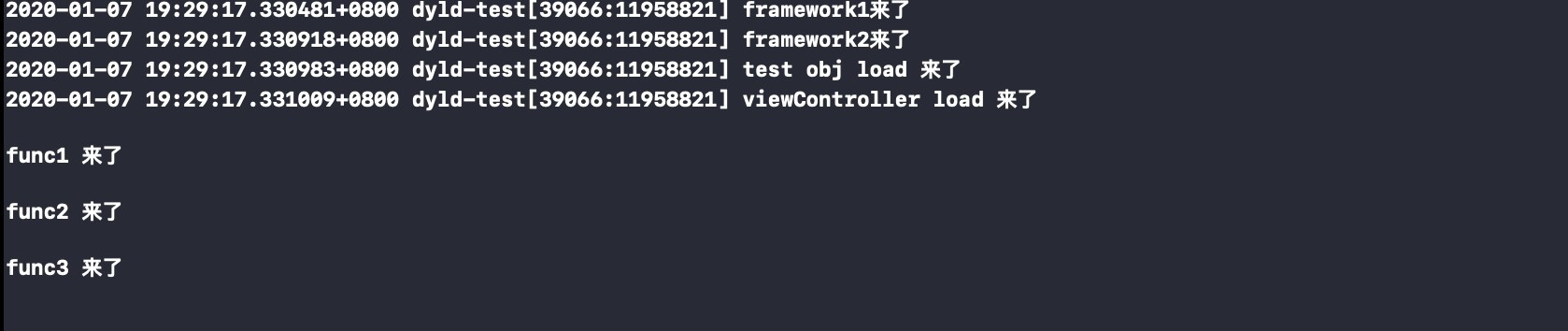
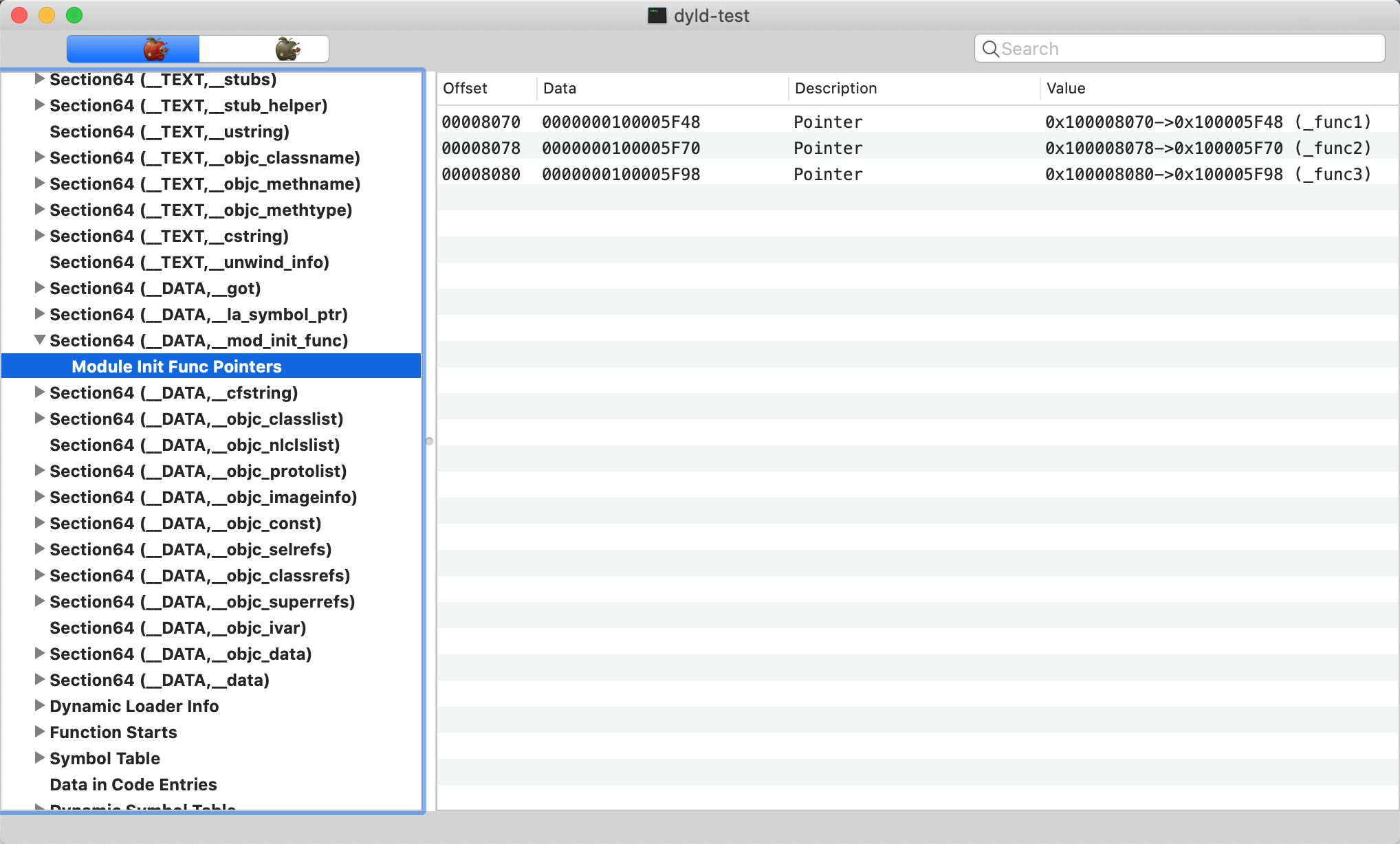
这种 c++ 构造方法存储在 __DATA 段 , __mod_init_func 节中.
2.1.6 找到主程序的入口
// find entry point for main executable
result = (uintptr_t)sMainExecutable->getEntryFromLC_MAIN();
找到真正 main 函数入口 并返回.
总结 :
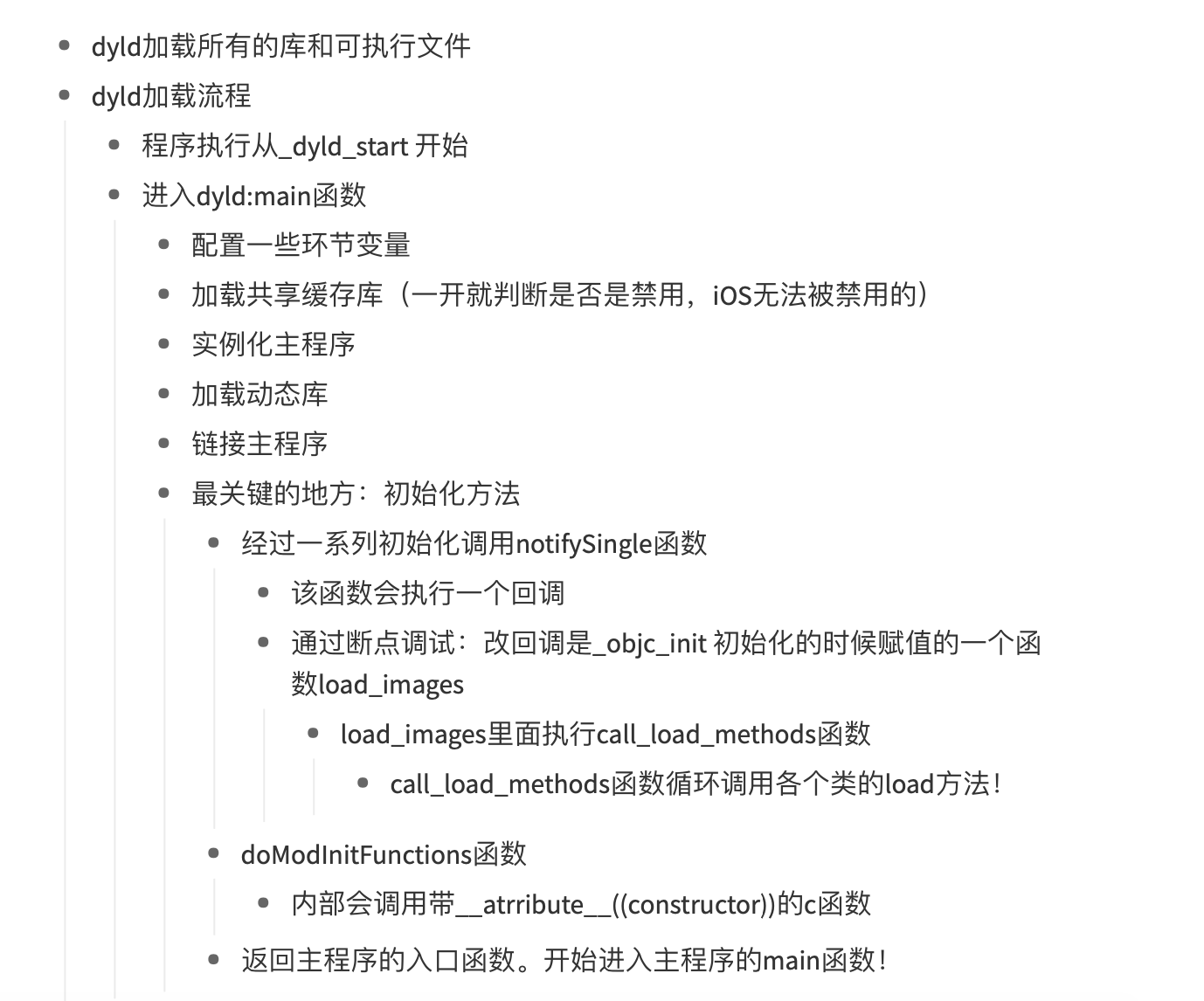
以上便是 dyld 加载应用的完整流程 . 建议大家仔细探索 .