Walkthrough: Point Cloud to Surface Registration - rg2/xreg GitHub Wiki
Point Cloud to Surface Registration
The xreg-sur-regi tool performs a registration between a point cloud and a surface using the iterative most-likely point (ICP) approach.
The method optimizes over a rigid tranformation, but may also attempt to recover scale.
ICP is intialized using the identity transformation by default, but two FCSV files may be provided in order to perform a paired-point registration to provide a better initialization.
A KD-Tree of the surface is constructed in order to efficiently perform closest-point lookups.
Example
This example will simulate the case of an intraoperative registration of the pelvis by digitizing points on the pelvis surface with a tracked tool.
Thepelvis.nii.gz volume created in the volume cropping example and the pelvis_sur.ply mesh created in the mesh creation example will be reused in this example.
First, load the pelvis volume into 3D Slicer and launch a volume rendering with a threshold displaying the bone surface. Next, use the fiducials module (point picker) to identify the following bilateral landmarks:
- Anterior Superior Iliac Spine (ASIS)
- Anterior Inferior Iliac Spine (AIIS)
- Pubic Symphisis (PS) A suffix of "-l" is used to indicate left side and "-r" is used to indicate the right side. The following screenshot demonstrates this process:
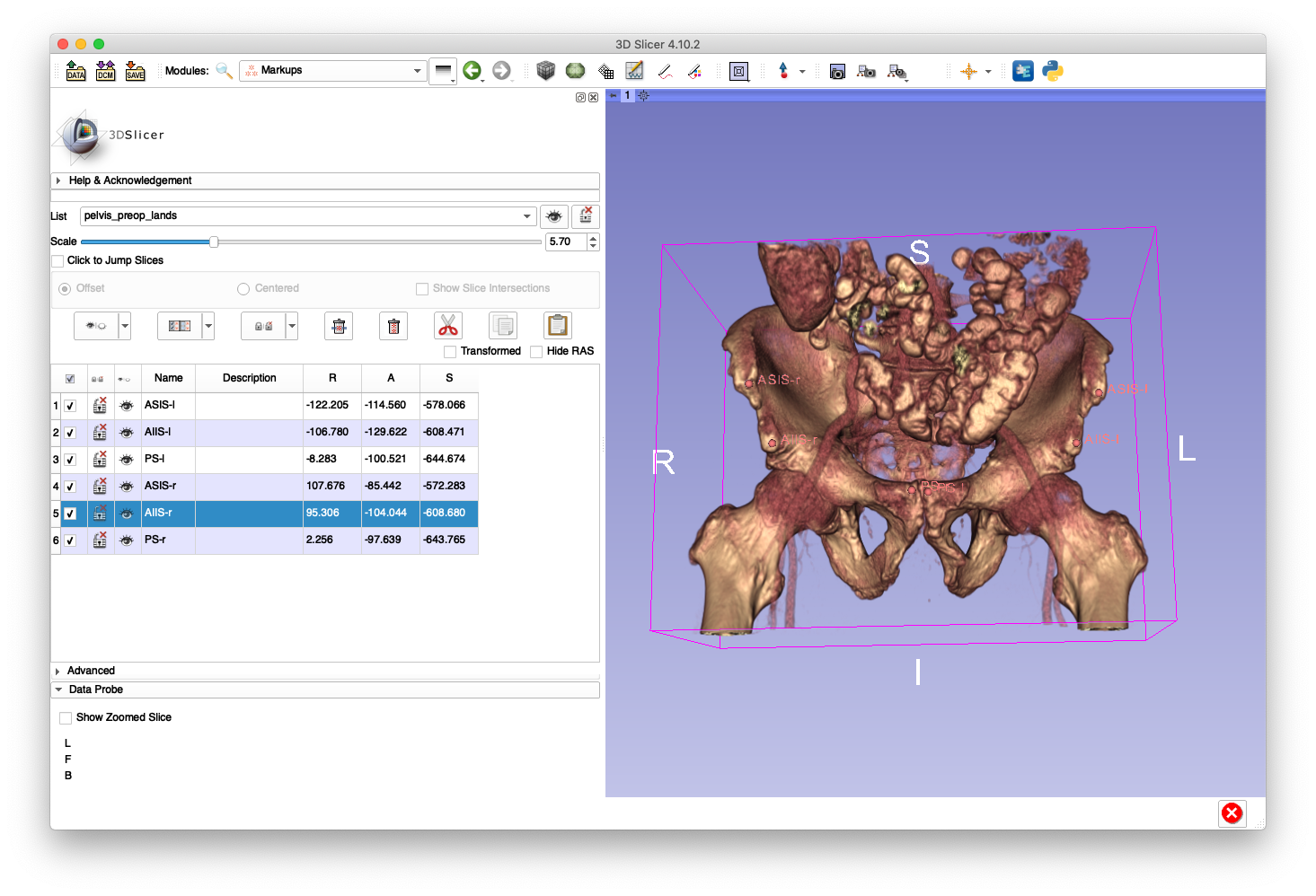
Save this FCSV file as pelvis_preop_lands.fcsv.
These will simulate preoperatively identified landmarks that will be useful for initializing an intraoperative ICP registration.
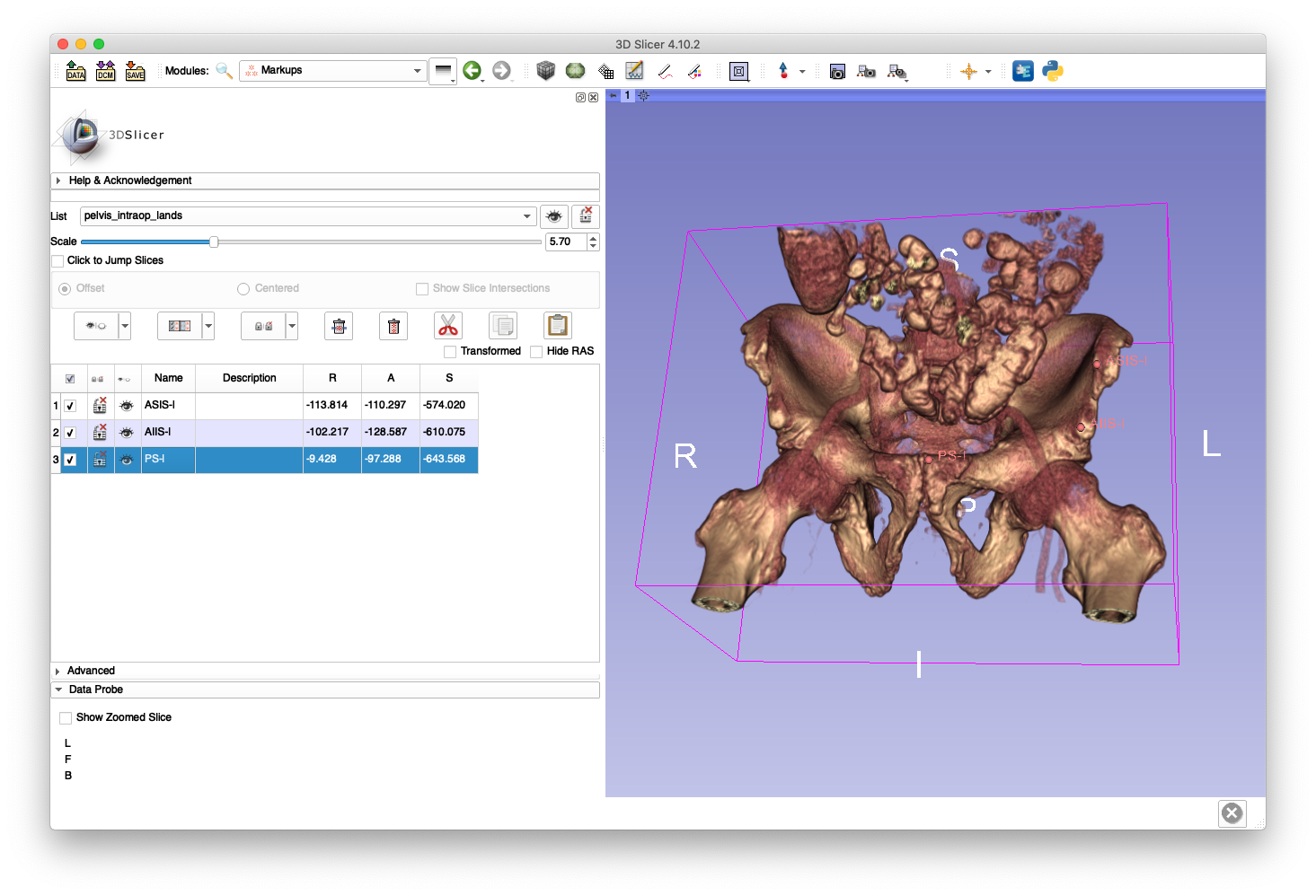
Next, we shall simulate the process of digitizing these landmarks intraoperatively for a surgery on the left side. In a new markup fiducials list, choose the ASIS-l, AIIS-l and PS-l again, but choose the landmarks slightly imprecisely and not exactly where the preoperative landmarks were selected. This is shown in the following screenshot:
Since the surgery is on the left side, we have assumed that an incision was made, soft-tissues dissected, and a tracked pointer tool is able to sufficiently reach the boney anatomy. Next, we shall simulate a digitization of the ASIS-r on the skin surface. Lower the volume rendering threshold and choose a point roughly corresponding to the ASIS-r.
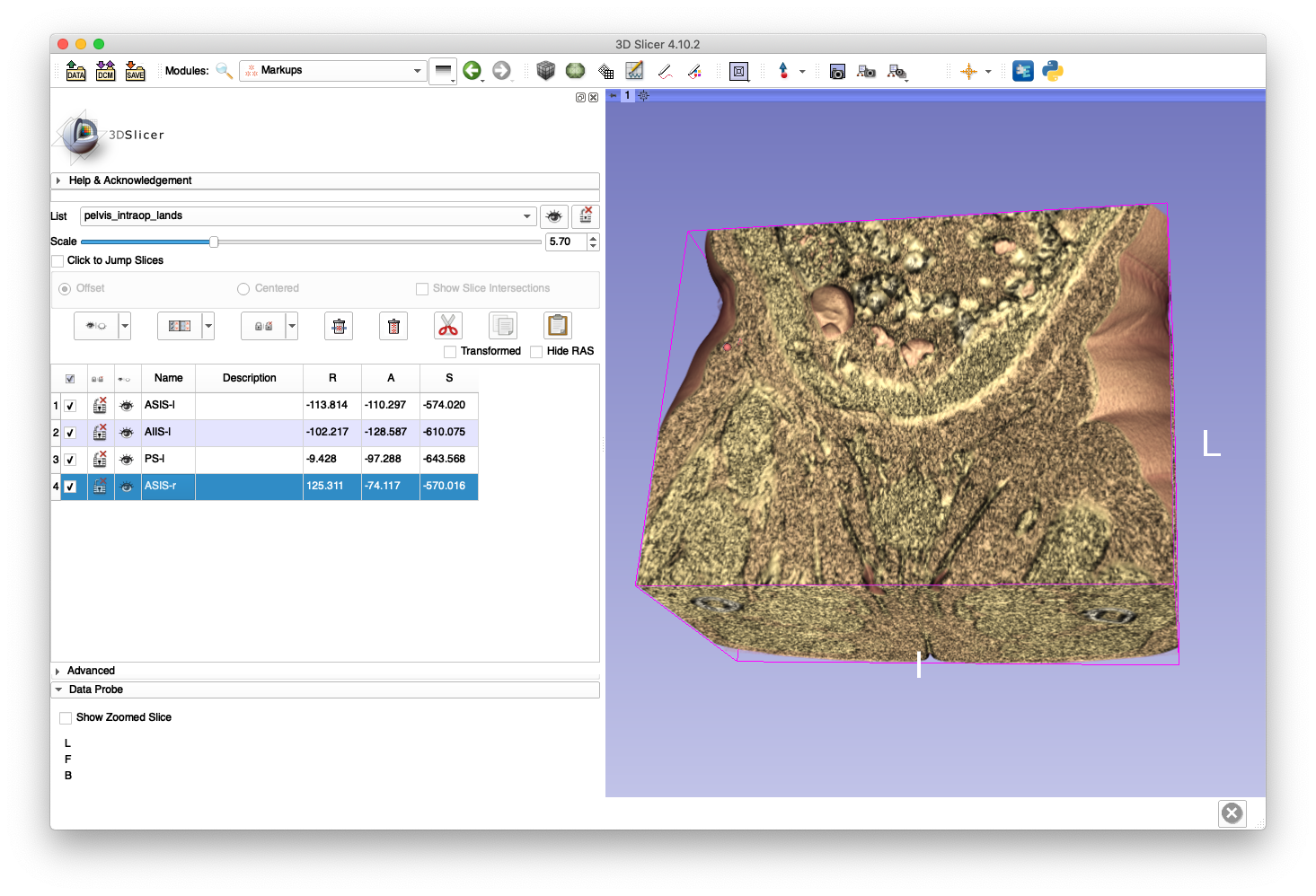
Since the volume was previously cropped, much of the skin surface is not visible. However, this will suffice for illustrating this example.
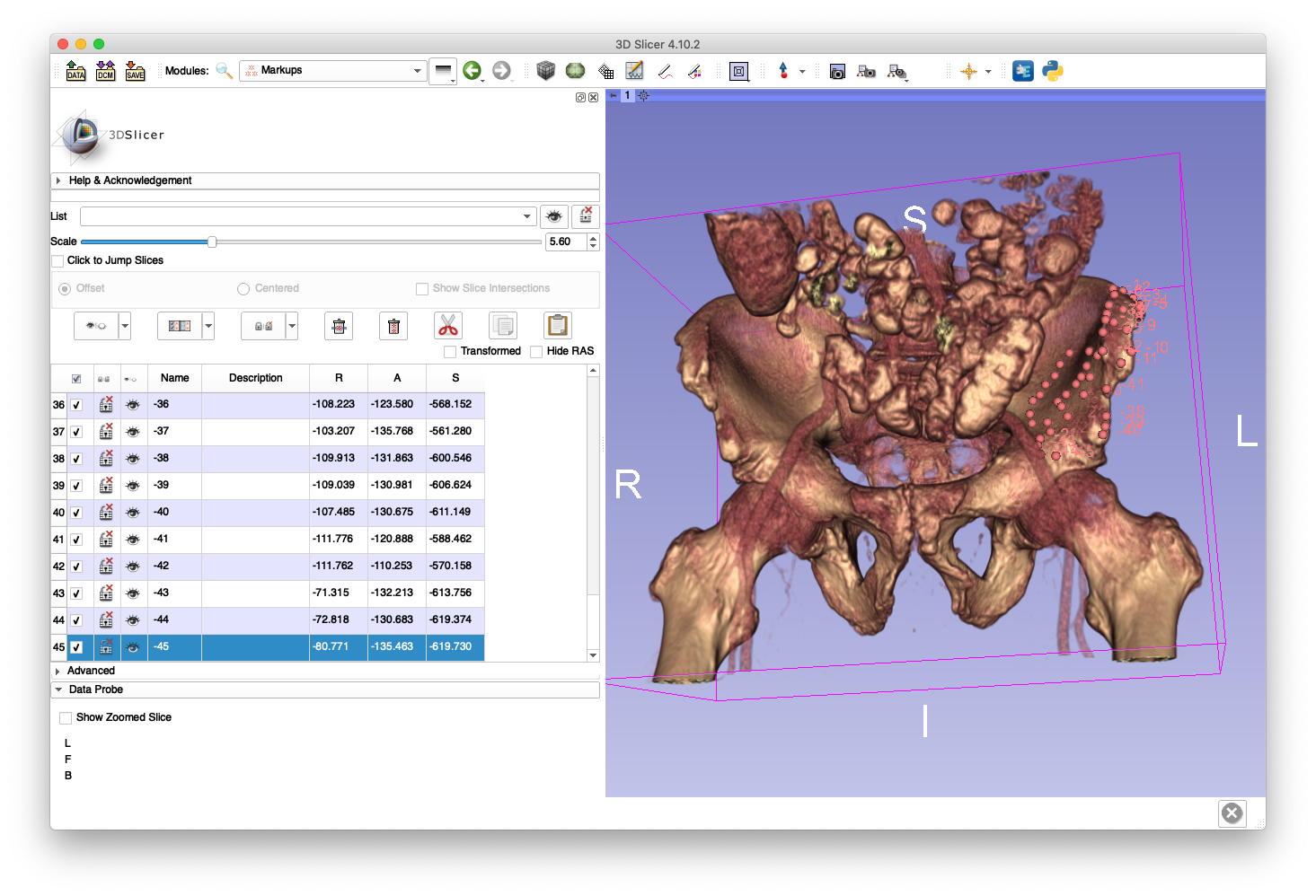
We shall now create a simulation of the clinicial moving the tracked pointer across the pelvis surface. Change the volume rendering back to show the bone surface, create a new markup fiducials list, and start digitizing points along the left iliac crest, left iliac spine, and left ilium wing. An example of this is shown below:
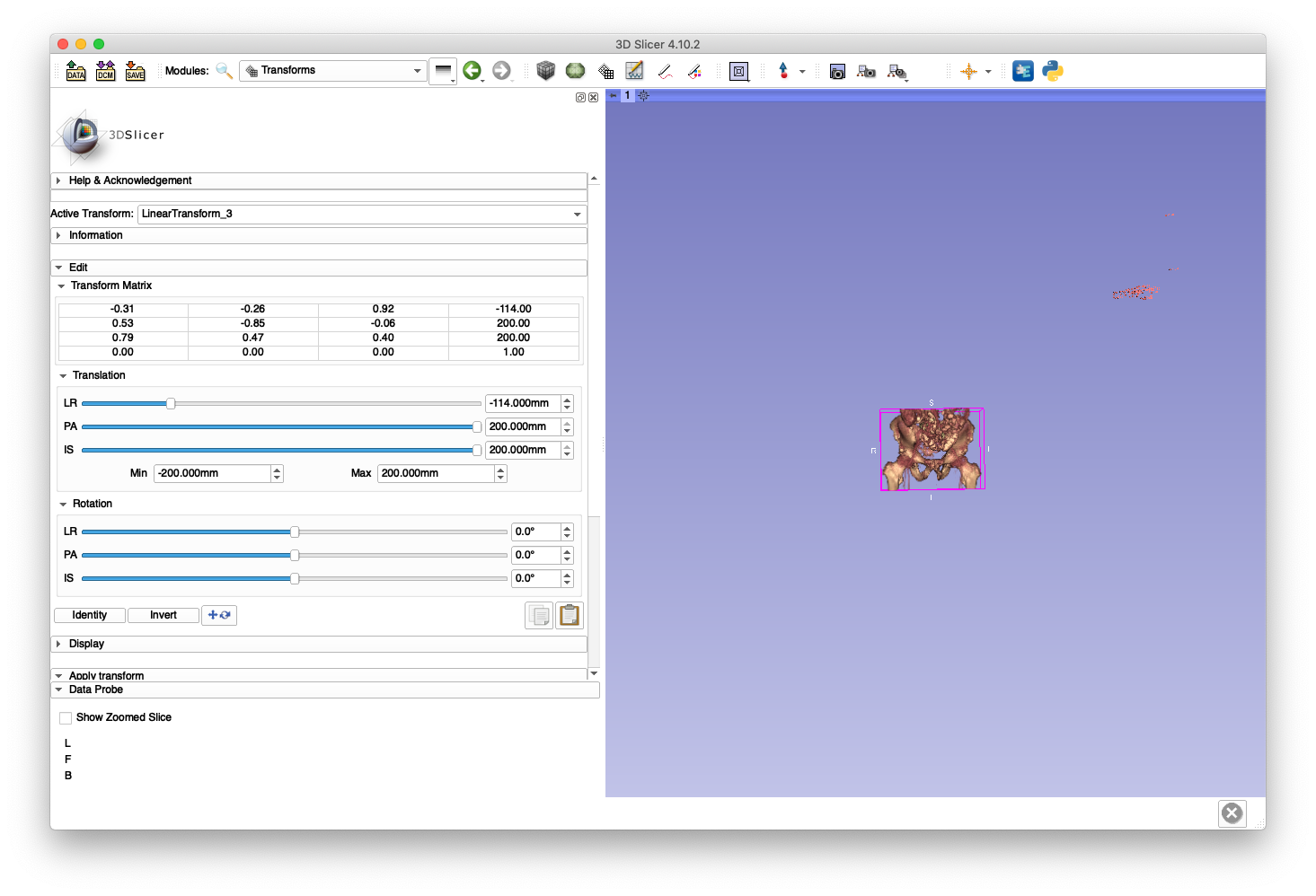
Next, use the transforms module in Slicer to apply an arbitrary rigid transform to the intraoperative landmarks and point cloud as shown below:
Use the "harden" transform button on the fiducials and save the intraoperative landmarks to disk as pelvis_intraop_lands.fcsv (an example is here) and pelvis_intraop_point_cloud.fcsv (an example is here).
We are now ready to run the ICP registration:
xreg-sur-regi pelvis_sur.ply pelvis_intraop_point_cloud.fcsv pelvis_regi.h5 --mesh-lands pelvis_preop_lands.fcsv --pts-lands pelvis_intraop_lands.fcsv
The output registration transform will be saved as pelvis_regi.h5.
Passing the verbose flag (-v) will enable printing of some other diagnostic information of the method, of which an example snippet is listed below:
reading mesh from disk...
complete.
Point Cloud is FCSV: Yes
reading point cloud from disk...
complete.
converting FCSV point cloud RAS --> LPS...
reading mesh landmarks...
AIIS-r: +95.306000 , -104.043999 , -608.679993
ASIS-r: +107.676003 , -85.442001 , -572.283020
AIIS-l: -106.779999 , -129.621994 , -608.471008
PS-r: +2.256000 , -97.639000 , -643.765015
PS-l: -8.283000 , -100.521004 , -644.674011
ASIS-l: -122.205002 , -114.559998 , -578.065979
reading point cloud landmarks...
ASIS-r: -655.932007 , +360.757996 , +36.963001
AIIS-l: -608.034973 , +288.065002 , -183.858994
PS-l: -675.512024 , +312.785004 , -109.380997
ASIS-l: -576.088013 , +264.449005 , -170.052994
landmarks RAS --> LPS...
estimating initial transformation using corresponding paired points...
running ICP...
ICP init...
Creating KD-Tree for target surface...
KD-Tree created.
Allocating additional working buffers...
ICP init complete!
Starting Point to Surface ICP: Num Pts 45
Surface Num Verts 302318, Num Tri Faces 604788
Initial Xform:
-0.329926 0.509905 -0.794447 311.505
-0.260543 -0.858066 -0.442538 -38.787
-0.90734 0.0609827 0.41595 32.7704
0 0 0 1
Stop Thresh: 0.999
Compute Scale: No
Outlier Det.: No
Iteration 0
Xform:
-0.329926 0.509905 -0.794447 311.505
-0.260543 -0.858066 -0.442538 -38.787
-0.90734 0.0609827 0.41595 32.7704
0 0 0 1
Mean Dist: 3.99371
Iteration 1
Xform:
-0.338177 0.538369 -0.771878 326.728
-0.266438 -0.841416 -0.470138 -35.3461
-0.902578 0.0466676 0.427989 28.3553
0 0 0 1
Mean Dist: 3.26624
Delta Mean Dist. Ratio: 0.817846
Iteration 2
Xform:
-0.343989 0.558381 -0.754906 337.537
-0.269822 -0.828842 -0.490119 -33.1895
-0.899371 0.0350941 0.435776 24.7853
0 0 0 1
Mean Dist: 2.67226
Delta Mean Dist. Ratio: 0.818147
.
.
.
Iteration 52
Xform:
-0.300638 0.530685 -0.792458 292.454
-0.246907 -0.845877 -0.472789 -49.0581
-0.921224 0.0535248 0.385333 35.9088
0 0 0 1
Mean Dist: 0.282814
Delta Mean Dist. Ratio: 0.998813
Iteration 53
Xform:
-0.300588 0.53067 -0.792488 292.414
-0.246999 -0.845879 -0.472736 -48.9918
-0.921216 0.0536451 0.385336 35.949
0 0 0 1
Mean Dist: 0.282509
Delta Mean Dist. Ratio: 0.998925
Iteration 54
Xform:
-0.300548 0.530636 -0.792526 292.373
-0.247109 -0.845892 -0.472656 -48.9141
-0.921199 0.0537845 0.385356 35.9935
0 0 0 1
Mean Dist: 0.282327
Delta Mean Dist. Ratio: 0.999354
termination criteria met: mean distance has stopped decreasing
writing regi transform to disk...
exiting...
Now transform the intraoperative point cloud using the registration transformation:
xreg-xform-fcsv pelvis_intraop_point_cloud.fcsv pelvis_regi.h5 pelvis_intraop_point_cloud_regi.fcsv
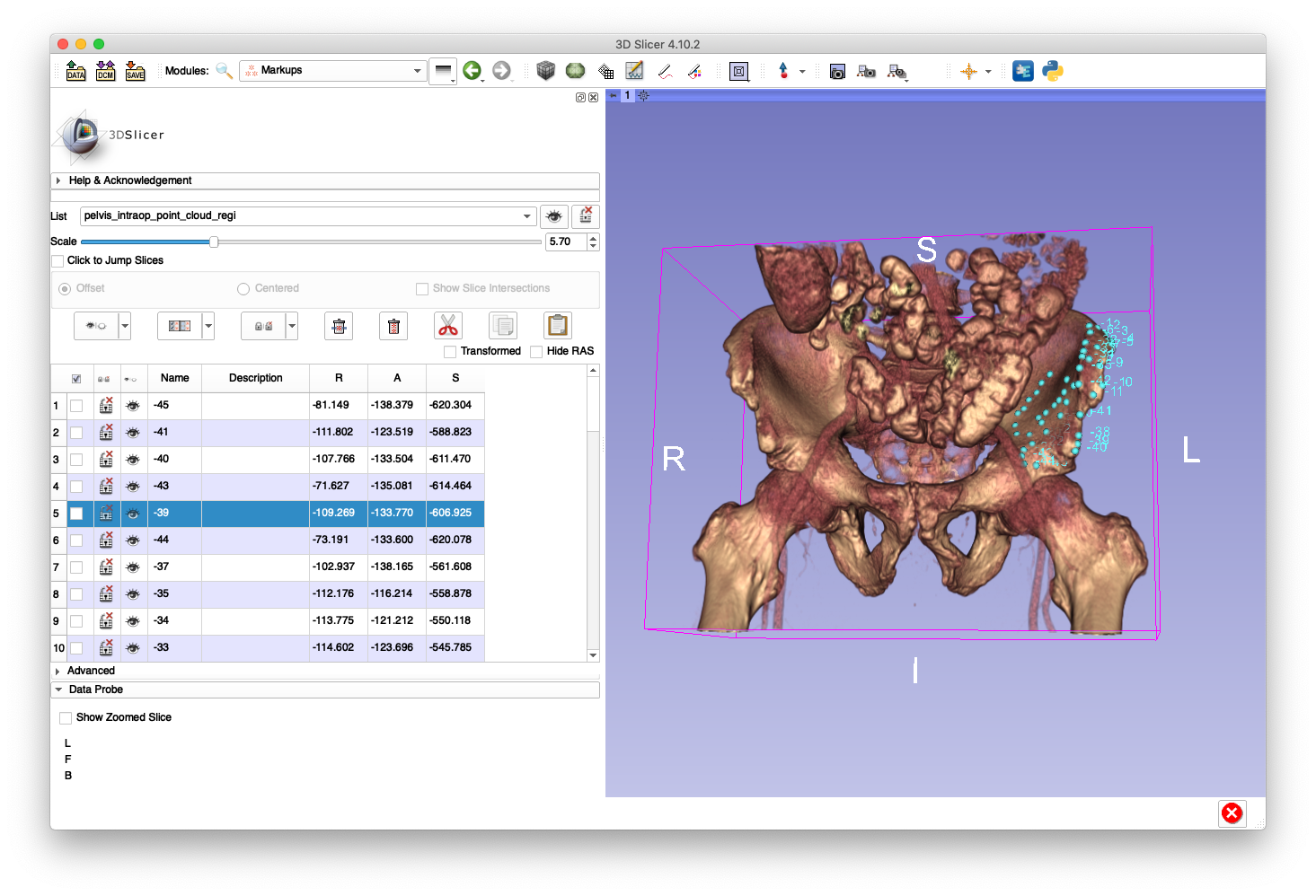
This transformed point cloud, pelvis_intraop_point_cloud_regi.fcsv, may then be loaded into 3D Slicer and overlaid on the bone surface, shown below: