controller - pypilot/pypilot GitHub Wiki
The controller provides voltage and current feedback and drives an electric motor. This allows for overcurrent protection (stalling) as well as feedback to detect and compensate weather helm and battery fluctuations.
The basic controller is an arduino (microprocessor) with a measurement shunt. This arduino may monitor temperature of the motor as well. A brushless (drone ESC) motor controller can be used, and reprogrammed if needed to drive a brushed motor.


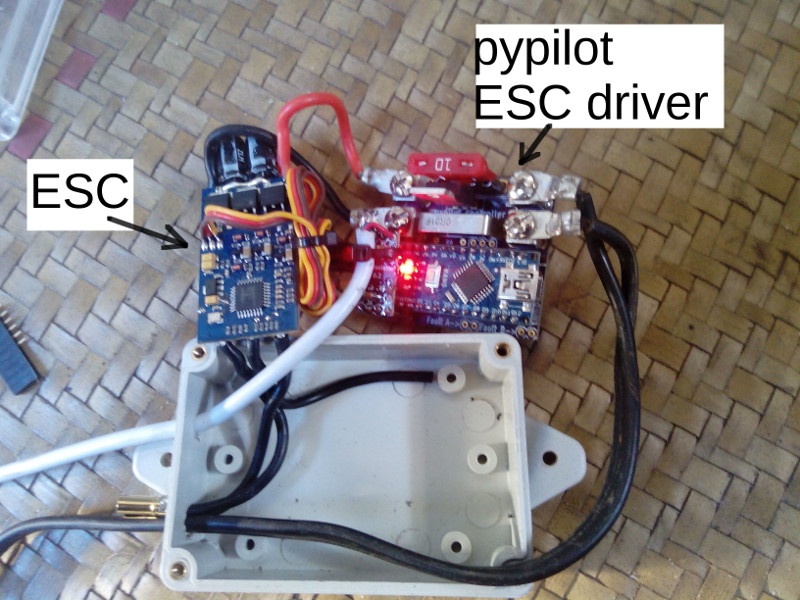
In the above controller, the white wires supply power. There is reverse polarity protection. The Red and Black wires go to the drive motor which moves the rudder. The four smaller wires are attached to the serial port of the autopilot computer running pypilot.
This controller can supply up to 3 amps continuous, or 10 amps in bursts (autopilot works in bursts), and includes over temperature protection.