Laboratorium 2 Dokumentacja - pw-eiti-anro-21l/dwornik_matysek GitHub Wiki
Pliki launch
demo.launch.py - plik uruchamiający węzeł robot_state_publisher
rviz.launch.py - plik uruchamiający Rviza i przekazujący plik robot.rviz
Pliki wykonywalne
state_publisher.py - plik wykonawczy dla węzła robot_state_publisher
DH-rpy.py - plik służący do przekształcenia macierzy DH na RPY
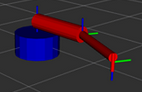
Manipulator
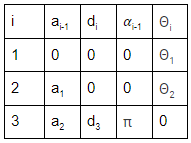
Tablica DH
Pliki związane z manipulatorem
robot.rviz - plik z modelem manipulatora
robot.urdf.xml - plik z parametrami zadanymi w tablicy DH
Manipulatorem można sterować za pomocą joint_state_publisher_gui
Publikowane tematy
- /tf
- /joint_state
Schemat struktury systemu
