tutorials ExampleVrx - osrf/vrx GitHub Wiki
VRX Example
This example illustrates a specific configuration similar to what some of the RobotX teams used in 2018. It includes:
- Fixed stern thrusters and a single lateral thuster - the 'T' propulsion configuration
- A standard set of onboard sensors
- Two forward facing cameras (stereo)
- One starboard facing camera
- GPS
- IMU
- 3D LiDAR
Simulation
Start Gazebo and spawn WAM-V with propulsion and sensor configuration.
roslaunch vrx_gazebo vrx.launch

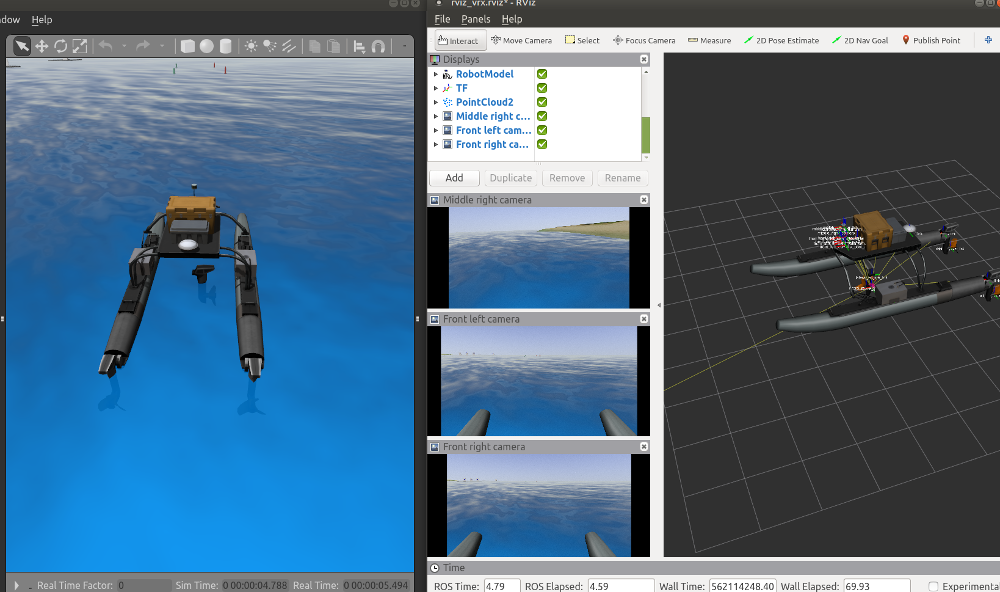
Visualization
After executing the previous command, open a new terminal and start RViz with example configuration file to read URDF and sensors. Follow these tutorials for an introduction to RViz.
roslaunch wamv_gazebo rviz_vrx.launch