Linear Algebra - newlife-js/Wiki GitHub Wiki
By KAIST 주재걸 교수님
Linear Euqation:

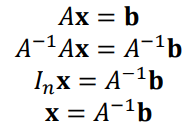
Inverse Matrix:
행렬 A에 곱해서 I(identity matrix)로 만드는 행렬(A^-1)
-
Linear System의 해를 구하는 데 사용
-
detA(ad-bc) = 0일 경우에는 Non-invertable(같은 직선 or 평행 직선이 존재하는 경우)
size(A) = m x n일 때,
m < n : variables > equations -> 무수히 많은 해(under-determined system)
m > n : variables < equations -> 해 없음(over-determined system)
Span:
벡터들의 모든 linear combinations의 set
(vector 2개로는 2차원을 구성, 3개로는 3차원을 구성할 수 있음, linearly independent할 때)
3번째 vector가 Span{v1, v2}에 속한다면, v3는 Span을 확장시키지 못함
b가 Span{a1, a2, a3}에 포함되어야 해가 존재
a1, a2, a3가 linearly independent해야 유일한 해가 존재
Subspace:
a subset of R^n closed under linear combination
subspace는 항상 Span으로 표현될 수 있음
Basis of a subspace(기저 벡터): a set of vectors that fully spans the given subspace H and linearly independent
- basis는 unique하지 않음
- basis의 vector수는 항상 같음(dimension)
Col Space(Col A):
행렬 A의 컬럼들에 의해 span된 subspace
rank A = dim Col A
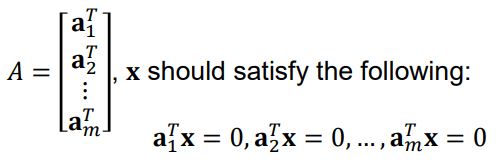
Null Space:
set of all solutions of a homogeneous linear system(Ax = 0)
Orthogonal Complement
Null space는 row space / col space와 다음과 같은 관계를 갖는다
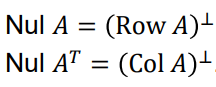
(Null space는 Ax = 0, 즉 A의 row들과 수직인 x의 집합을 뜻하기 때문)
Basis Theorem:
Any linearly independent set of exactly p elements in H is automatically a basis for H.
-> Any set of p elements of H that spans H is automatically a basis for H.
Linear Transformation
T(Transformation = function = mapping): x(input Domain(정의역)) -> y(output = image
Range(치역)
Co-domain(공역))
T is linear if T(cu + dv) = cT(u) + dT(v)
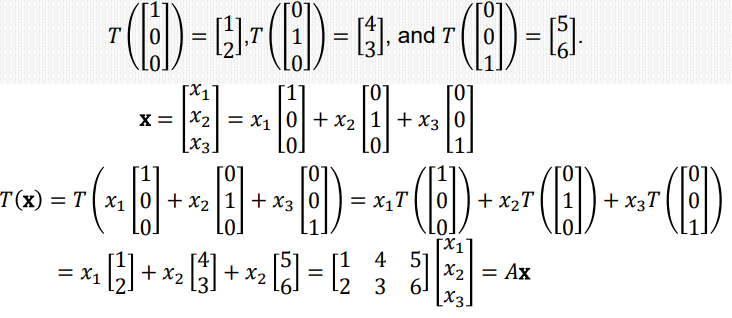
행렬곱[T(x) = Ax]을 통해 차원간 linear transformation 수행
A를 T의 standard matrix라고 함(A = [T(e1), T(e2), ..., T(en)])
at Neural Network
선형 변환 + 수축을 통해 비선형 classification을 수행할 수 있다.
출처: colah.github.io
Affine Layer:
bias가 더해진 linear Layer -> x에 값 1의 bias 차원을 넣어주어 linear layer로 변경해줄 수 있다.
onto(전사 함수):
range(치역)과 co-domain(공역)이 같은 경우, domain 갯수 >= co-domain 갯수
(Neural Network는 차원 변환이 대부분 일어나기 때문에 onto도 성립하기 어려움)
- T maps R^n onto R^m if and only if the columns of A span R^m
col A = R^m
one-to-one(일대일 함수):
1 input이 1 output에만 mapping되는 경우, domain 갯수 = range 갯수
(Neural Network는 one-to-one이 안되도록 설계 / ex: 0 or 1로)
- T is one-to-one if and only if the columns of A are linearly independent
참고
Least Squares:
over-determined system에서 최적의 해를 구하기 위해 사용하는 error term(b-Ax)
b-Ax를 최소화하는 최적의 해가 x_hat이고, b를 A subspace에 수선의 발로 내렸을 때 만나는 점이다.
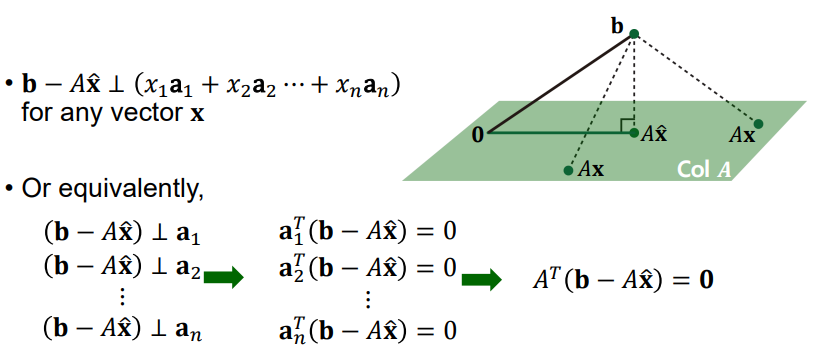
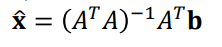
Normal Equation:
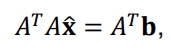
->
Orthogonal: 내적 = 0
Orthonormal: orthogonal하면서 길이가 1
Gram-Schmidt Orthogonalization:
linearly independent basis -> orthogonal basis로 변환
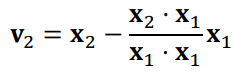
x2를 x1에 orthogonal projection하여 수선의 발에서 x2로 가는 수선 벡터를 v2로
x3를 Span{v1, v2}에 projection하여 수선의 발에서 x3로 가는 수선 벡터를 v3로
...
v_n = x_n - proj_Wn-1(x_n)
QR Factorization(행렬 분해)
A = QR
Q(m x n): orthonormal basis for Col A(m x n)
R(n x n): upper triangular invertible matrix with positive entries on diagonal
a1 = u1 * ||v1||
a2 = k1u2 + k2u1(k1 = ||v2||, k2 = x2 u1 내적)
...
a_n = j1u_n + j2u_n-1 + ... + j_n-1*u1 (j1 = ||v_n||, j2 = x_n u_n-1 내적)
(u1~u_n-1: Q의 원소, ||v1||/k/j: R의 원소)
--> upper triangular matrix R이 만들어짐
Eigenvector
Ax = λx를 만족하는 nonzero vector x(λ를 eigenvalue라고 함)
(A-λI)x = 0
Eigenspace: (A-λI)x의 Null space
det(A-λI) = 0(characteristic equation)의 해 λ를 구하면 됨
Algebraic multiplicity: Eigenvalue가 몇중근인지를 말함, multiplicity 이하의 eigenspace dimension을 갖는다
Diagonalization
D = P^-1AP
P의 각 컬럼은 A의 eigenvector이면서, D의 각 원소는 eigenvalue이어야 함
P의 역행렬이 존재하기 위해서는 정사각 행렬이면서 각 컬럼들이 linearly independent해야 함
EigenDecomposition(of A) : A = PDP^-1
y = P^-1x: change of basis(y는 x의 새로운 eigenspace에서의 좌표값)
z = Dy: Element-wise Scaling
T(x) = Pz: back to original basis
Singular Value Decomposition(SVD)
U, V는 orthonormal basis matrix
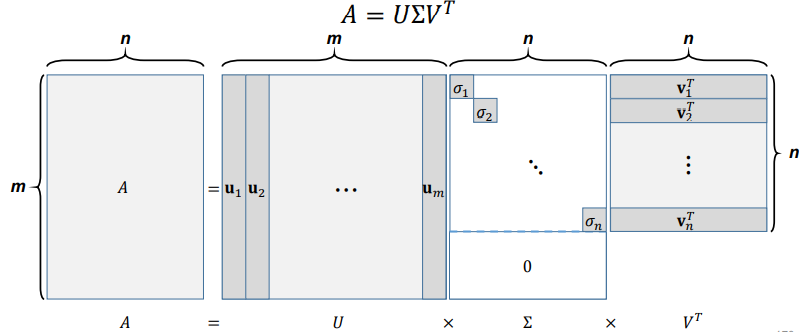
AV=U∑
-> 
※ symmetric matrix는 orthogonally diagonalizable(n개의 orthogonal한 eigenvector를 가진다)
Spectral Theorem: symmetric matrix는 n개의 real eigenvalue를 갖고(허근이 없음), 각 eigenvalue는 multiplicity 만큼의 차원을 갖는 eigenspace를 갖는다. 각각의 eigenspace는 서로 orthogonal하다.
-> orthogonally diagonalizable하다..
Spectral Decomposition:
Eigendecomposition of symmetric matrix(S = UDU^T)
-> orthonormal 성분별로 eigenvalue만큼 가중치를 곱해서 더한 형태
Positive Definite:
Semi-positive definite:
ex) AA^T
x^T AA^T x = (x^T A)(A^T x) = ||A^T x||^2 >= 0
모든 직사각 행렬에 대해 SVD는 항상 존재
eigendecomposition이 불가능한 정사각 행렬에 대해서도 SVD는 존재
symmetric positive definite matrix에 대해서는 SVD = eigendecomposition
Low-rank approximation:
A와 가장 비슷한 형태를 띄는 Rank r의 행렬 A_r을 찾는 것(argmin||A-A_r||_F)
∑의 σ는 all positive로 함(eigenvector의 방향만 반대로 바꿔주면 되므로)
σ는 내림차순으로 배치(eigenvector의 순서 바꿔줌)하여 r개만 남김
SVD의 U 매트릭스의 r개 컬럼만 가져오는 것
PCA(Principal Component Analysis)
Orthogonal projection을 통해 Dimension reduction을 수행
coordinate system을 변화시켜서 적은 수의 principal components만으로도 data 분포(분산)를 잘 설명하도록 하는 것
- Zero-centering(mean substraction)
- Covariance 계산(Cov(X) = 1/(m-1)*X^TX: symmetric)
- Covariance Matrix의 eigenvector들이 principal component들이 된다.
Covariance는 유지하면서 orthogonal한 vector들(U)을 구하고, σ를 내림차순으로 정렬하여, 상위 n개만 뽑아 dimension reduction을 한다.
Cov(X)의 eigendecomposition = 1/(m-1)*Uσ^2V^T 를 구하는 것은
X의 svd = UσV^T 를 구하는 것과 같다.
※ explanation ratio: σ n개의 제곱합 / σ 전체의 제곱합