Chevy Bolt - nasser2019/CommaAi GitHub Wiki
Configuration Variations
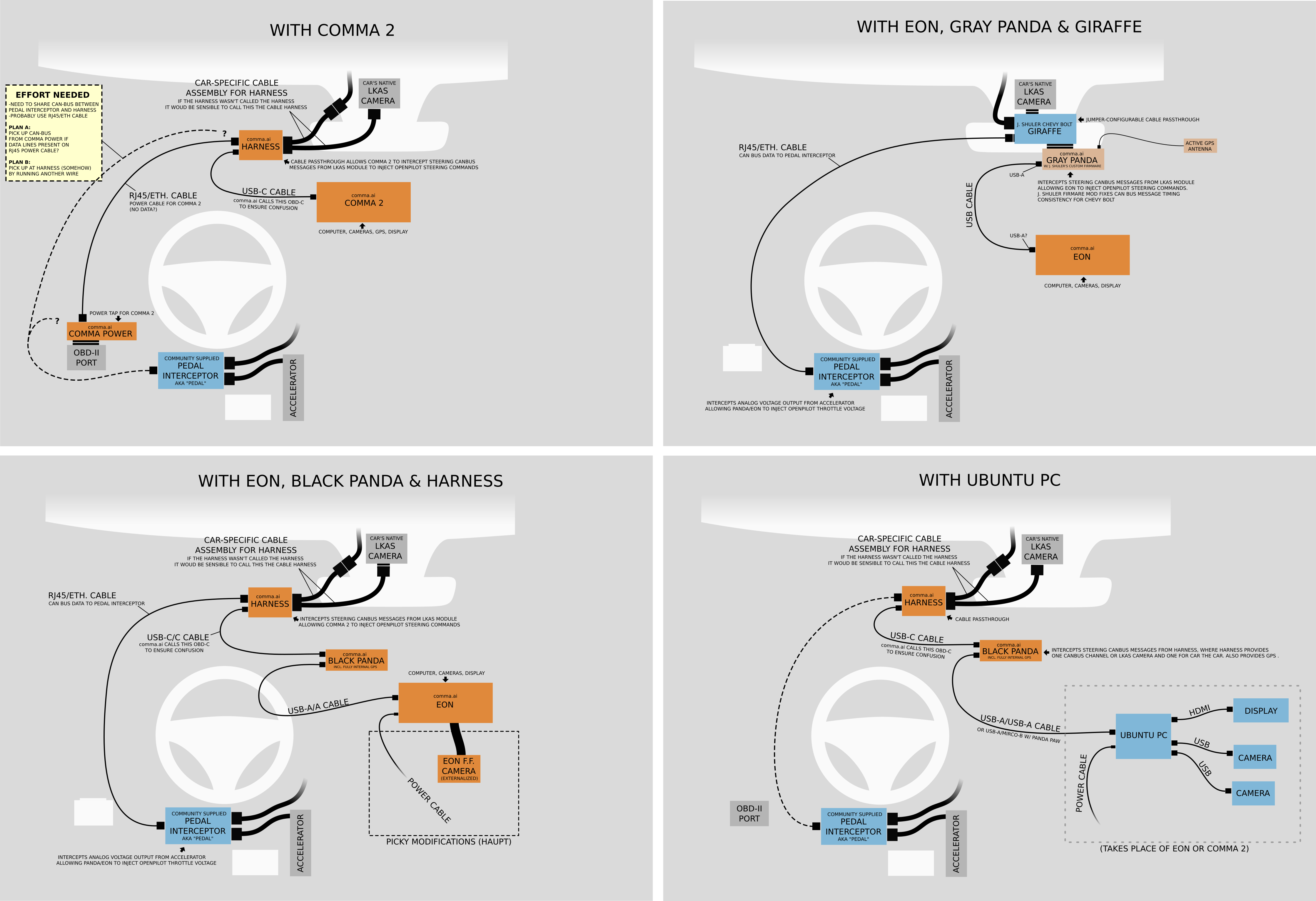
To contribute to the above diagrams, download the .svg file and use Inkscape. The .svg file also includes a bunch of "general case" diagrams for openpilot not specific to the Bolt, but they may contain errors.
{kind=link}
Comma 2
The Comma 2 has an onboard Panda and removes the need for the Giraffe by connecting directly to the car's buses. To do this, you'll need a harness modified to connect properly to the right buses:
 Link to the Diagram on EasyEDA
Link to the Diagram on EasyEDA
To build this yourself you'll need the following parts:
- Male LKAS Connector
- Female LKAS Connector
- At least 12 crimp sockets for the Female Connector
- 22-24 AWG wire. Recommend PVC for abrasion resistance.
- Comma Dev Harness Wires (select Development Vehicle, only need a Black Panda if you have an Eon) or 6 & 7:
- 26-socket Connector
- At least 18 crimp sockets
To assemble, you'll need a crimping tool and a soldering kit. Crimp the sockets onto the wires for the female connectors and insert to the proper slots. Solder the wires to the male connector, wire directly to exterior pins. I shrink-wrapped the solder joints and I plan to reinforce the pins / solder joints with epoxy resin once I'm sure no more solder modifications are needed.
The Comma Pedal can be connected to the Comma Power and the harness using an ethernet splitter. (This configuration is tested to work on the Bolt, however, the harness provides enough power making the use of the Comma Power unnecessary).
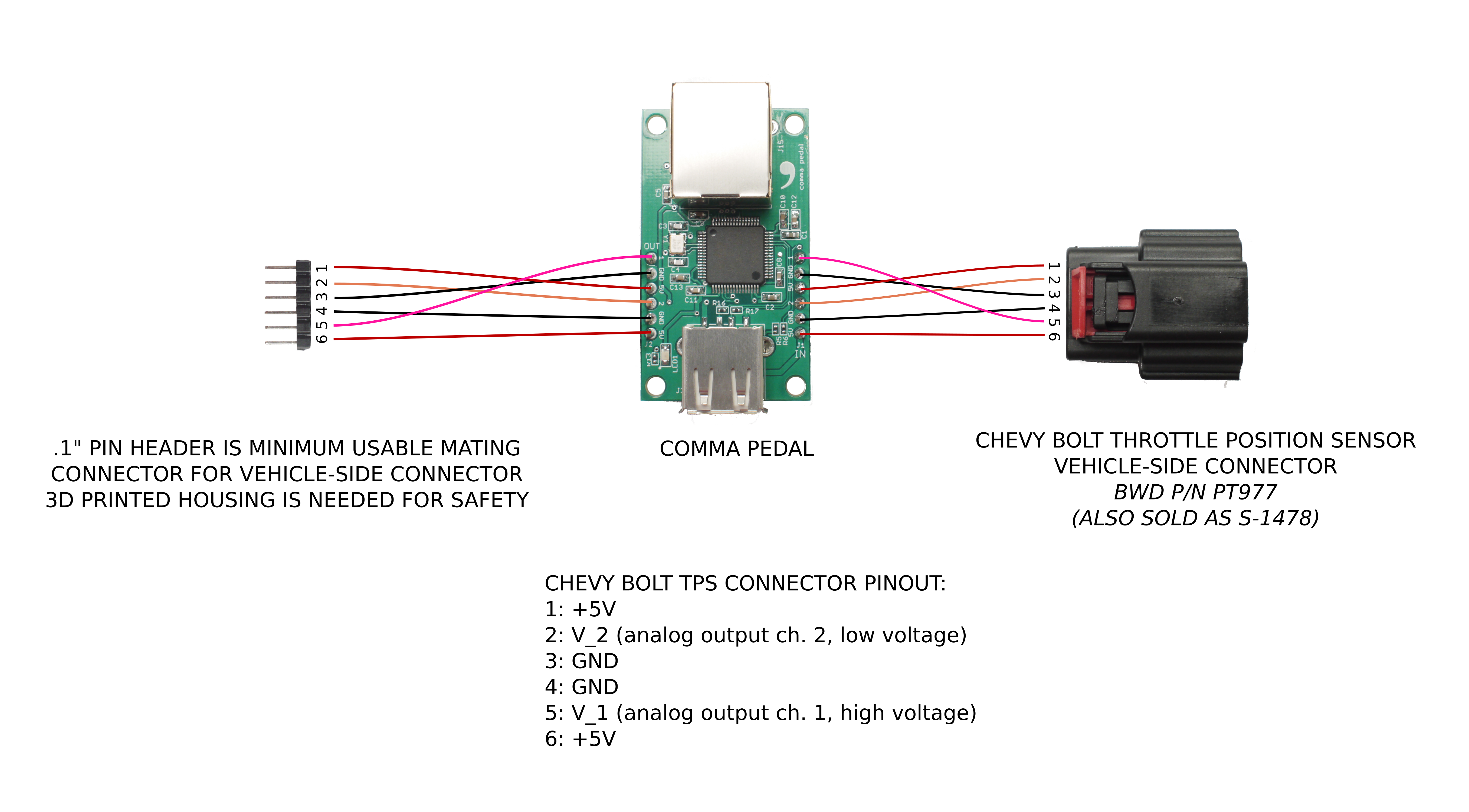
Pedal Interceptor
- Gerber files and BOM available here
- The vehicle-side TPS connector is BWD P/N PT977 (AKA S-1478)
- J. Shuler's 3D model for printing the mating connector housing for the TPS connector is here. If you don't feel like making an Autocad account, the STL can be downloaded directly here
- The Pedal Interceptor wiki is here
- Instructions for the initial installation of the firmware are here
Wiring the comma.ai Pedal Interceptor for the Chevy Bolt:
Installing firmware, updating, etc
Use the instructions on the official wiki to ssh into the Comma2 or Eon and to install a different fork of OpenPilot, as desired: Configuring_OpenPilot
(From Felger:) The first time you install a new fork that uses submodules (e.g. Panda or Pedal) you need to run:
git submodule init
git submodule update
Then to change panda code, for example, run
pkill -f boardd
Then in /data/openpilot/panda/board run
make
Alternate Single-Side Pedal Interceptor
This version is only slightly longer and has a much larger test point for entering DFU/programming mode
- KiCad design files, Gerber Files and BOM available here
- The vehicle-side TPS connector is BWD P/N PT977 (AKA S-1478)
- J. Shuler's 3D model for printing the mating connector housing for the TPS connector is here. If you don't feel like making an Autocad account, the STL can be downloaded directly here
- The Pedal Interceptor wiki is here
- Instructions for the initial installation of the firmware are here
Modding the EON
(Coming soon)
Adding IR LEDs for improved night performance
(Coming soon)
Info on an abortive effort to get OpenPilot running on an SBC
Installing OpenPilot on an NVIDIA Jetson Nano
References
Giraffe Info: Gerber files Parts list J. Shuler's design page