Firmware upload - ldemk/choko GitHub Wiki
PC SETUP
INSTALL ROS ON REMOTE PC
(use docker instead)
- $ SUDO APT-GET UPDATE
- $ SUDO APT-GET UPGRADE
- $ WGET HTTPS://RAW.GITHUBUSERCONTENT.COM/ROBOTIS-GIT/ROBOTIS_TOOLS/MASTER/INSTALL_ROS_KINETIC.SH && CHMOD 755 ./INSTALL_ROS_KINETIC.SH && BASH ./INSTALL_ROS_KINETIC.SH
INSTALL DEPENDENT ROS PACKAGES
(use docker instead)
SUDO APT-GET INSTALL ROS-KINETIC-JOY ROS-KINETIC-TELEOP-TWIST-JOY ROS-KINETIC-TELEOP-TWIST-KEYBOARD ROS-KINETIC-LASER-PROC ROS-KINETIC-RGBD-LAUNCH ROS-KINETIC-DEPTHIMAGE-TO-LASERSCAN ROS-KINETIC-ROSSERIAL-ARDUINO ROS-KINETIC-ROSSERIAL-PYTHON ROS-KINETIC-ROSSERIAL-SERVER ROS-KINETIC-ROSSERIAL-CLIENT ROS-KINETIC-ROSSERIAL-MSGS ROS-KINETIC-AMCL ROS-KINETIC-MAP-SERVER ROS-KINETIC-MOVE-BASE ROS-KINETIC-URDF ROS-KINETIC-XACRO ROS-KINETIC-COMPRESSED-IMAGE-TRANSPORT ROS-KINETIC-RQT-IMAGE-VIEW ROS-KINETIC-GMAPPING ROS-KINETIC-NAVIGATION ROS-KINETIC-INTERACTIVE-MARKERS
INSTALL DEPENDENT ROS PACKAGES
(use docker instead)
- $ CD ~/CATKIN_WS/SRC/
- $ GIT CLONE HTTPS://GITHUB.COM/ROBOTIS-GIT/TURTLEBOT3_MSGS.GIT
- $ GIT CLONE HTTPS://GITHUB.COM/ROBOTIS-GIT/TURTLEBOT3.GIT
- $ CD ~/CATKIN_WS && CATKIN_MAKE
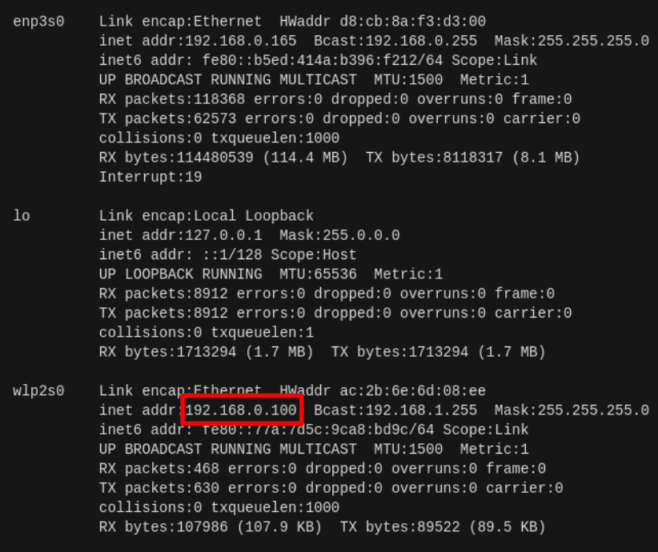
NETWORK CONFIGURATION
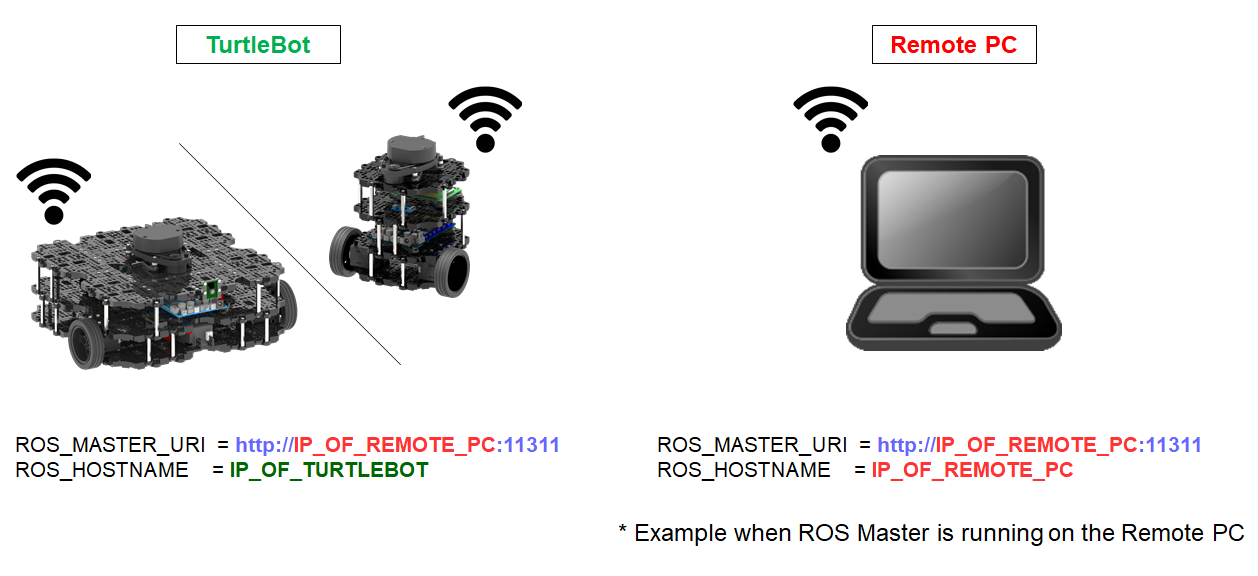
Use ifconfig OR ip –s address to find out the ip address
Change the ip addres of the device and corresponding ROS-Master usfin the following command nano ~/.bashrc
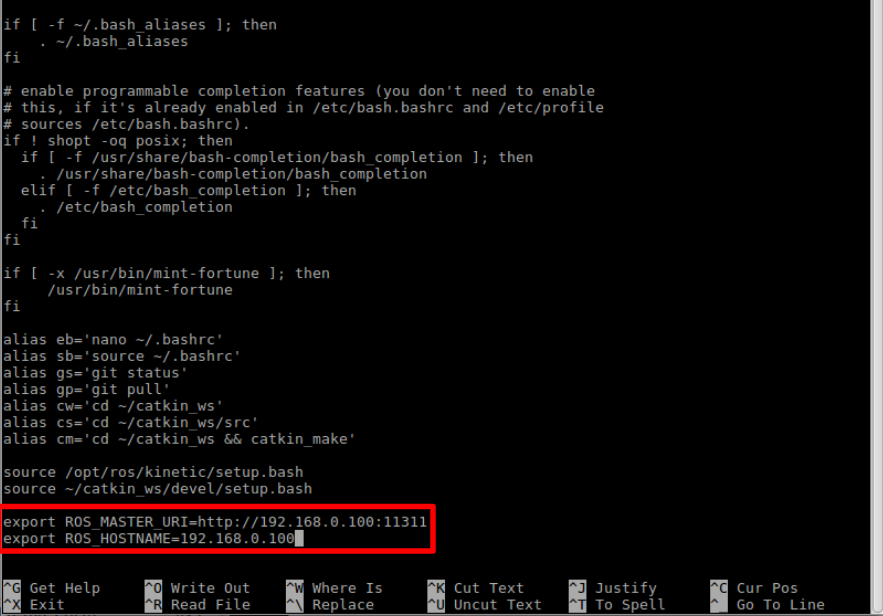
now apply changes source ~/.bashrc
RPI SETUP
INSTALL OS
- DOWNLOAD THE LINUX DISTRO IMAGE BASED ON RASPBIAN FOR TURTLEBOT3
- TO BURN THE IMAGE TO SD CARD
-
- VISIT ETCHER.IO AND DOWNLOAD AND INSTALL THE ETCHER SD CARD IMAGE UTILITY.
-
- RUN ETCHER AND SELECT THE LINUX IMAGE YOU DOWNLOADED ON YOUR COMPUTER OR LAPTOP.
-
- SELECT THE SD CARD DRIVE.
-
- CLICK BURN TO TRANSFER THE IMAGE TO THE SD CARD.
-
- (OTHER METHODS TO BURN) YOU CAN USE ‘DD’ COMMAND IN LINUX OR USE APPLICATION ‘WIN32DISKIMAGER’ IN WINDOWS
- AFTER THE INSTALLATION, YOU CAN LOGIN WITH USERNAME PI AND PASSWORD TURTLEBOT.
- SUDO RASPI-CONFIG (SELECT 7 ADVANCED OPTIONS > A1 EXPAND FILESYSTEM)
- SETUP WIFI
- SUDO APT-GET INSTALL NTPDATE
- SUDO NTPDATE NTP.UBUNTU.COM
- NANO ~/.BASHRC
(MODIFy THE
LOCALHOSTTORASPBERRY PI'S IP) EXPORT ROS_MASTER_URI=HTTP://LOCALHOST:11311 EXPORT ROS_HOSTNAME=LOCALHOST - SOURCE ~/.BASHRC
From romote PC
Execute the following command SSH [email protected] (THE IP 192.168.XXX.XXX IS YOUR RASPBERRY PI'S IP OR HOSTNAME)
MCU SETUP
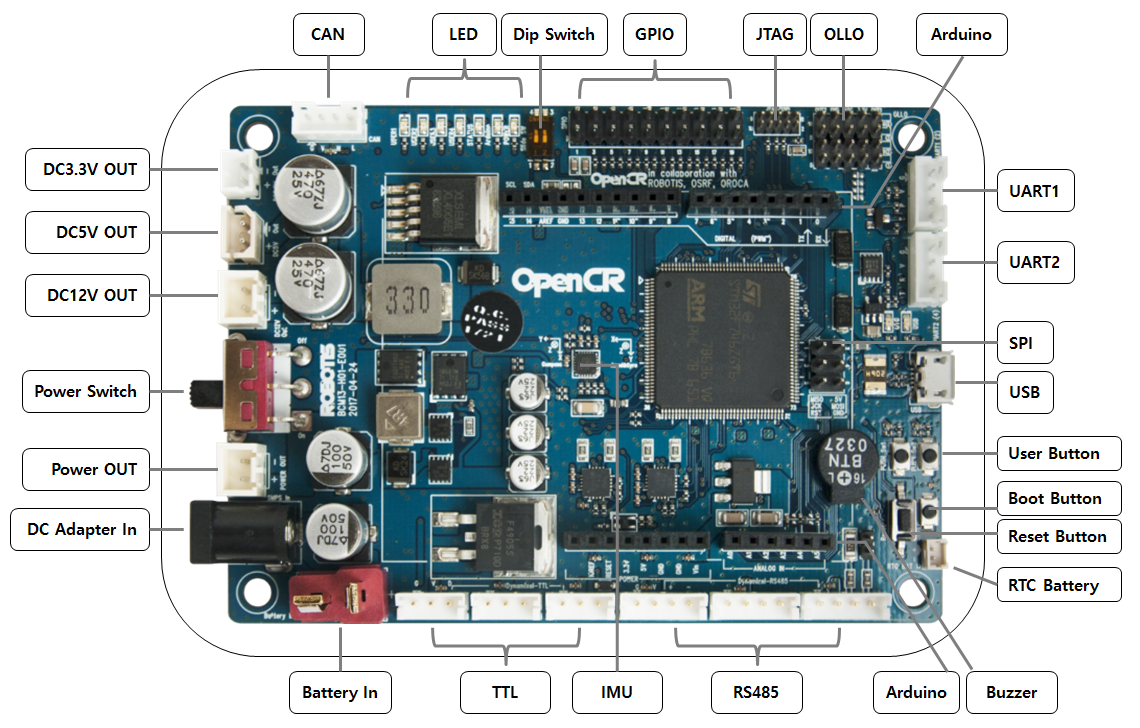
Firmware upload
- INSTALL ARDUINO IDE FOR OPENCR
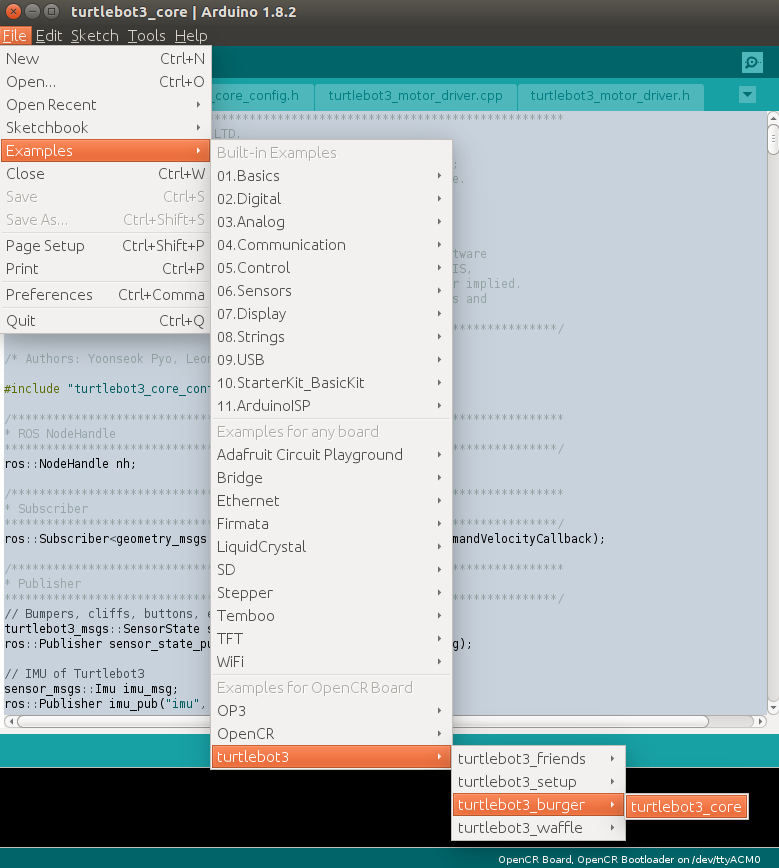
- INSIDE ARDUINO IDE DO THE FOLLOWING STEPS FILE → EXAMPLES → TURTLEBOT3 → TURTLEBOT3_WAFFLE → TURTLEBOT3_CORE.
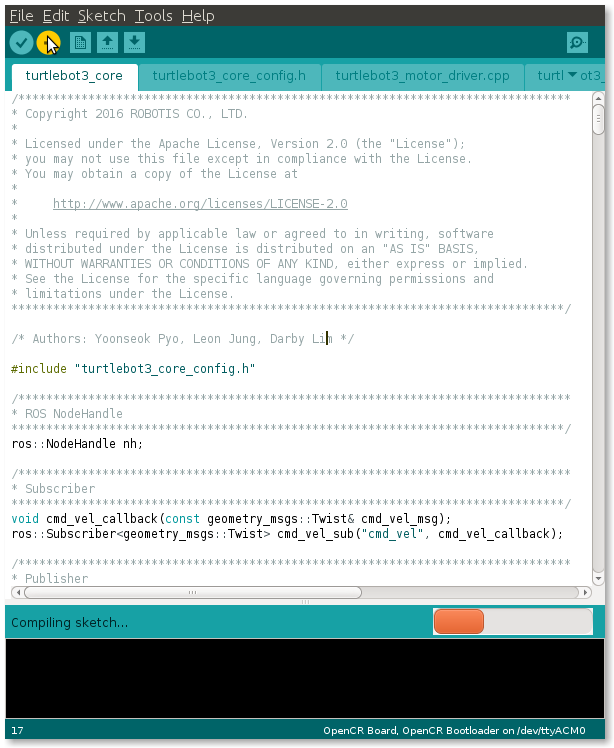
Wait untill the uploading process ends
CONTROLLING THE TURTLEBOT
FOLLOW THE INSTRUCTIONS