TEST FLIGHT: Full autonomous mission with the Cheerson CX 20 Auto pathfinder (Quanum NOVA) - jlnaudin/x-VTOLdrone GitHub Wiki
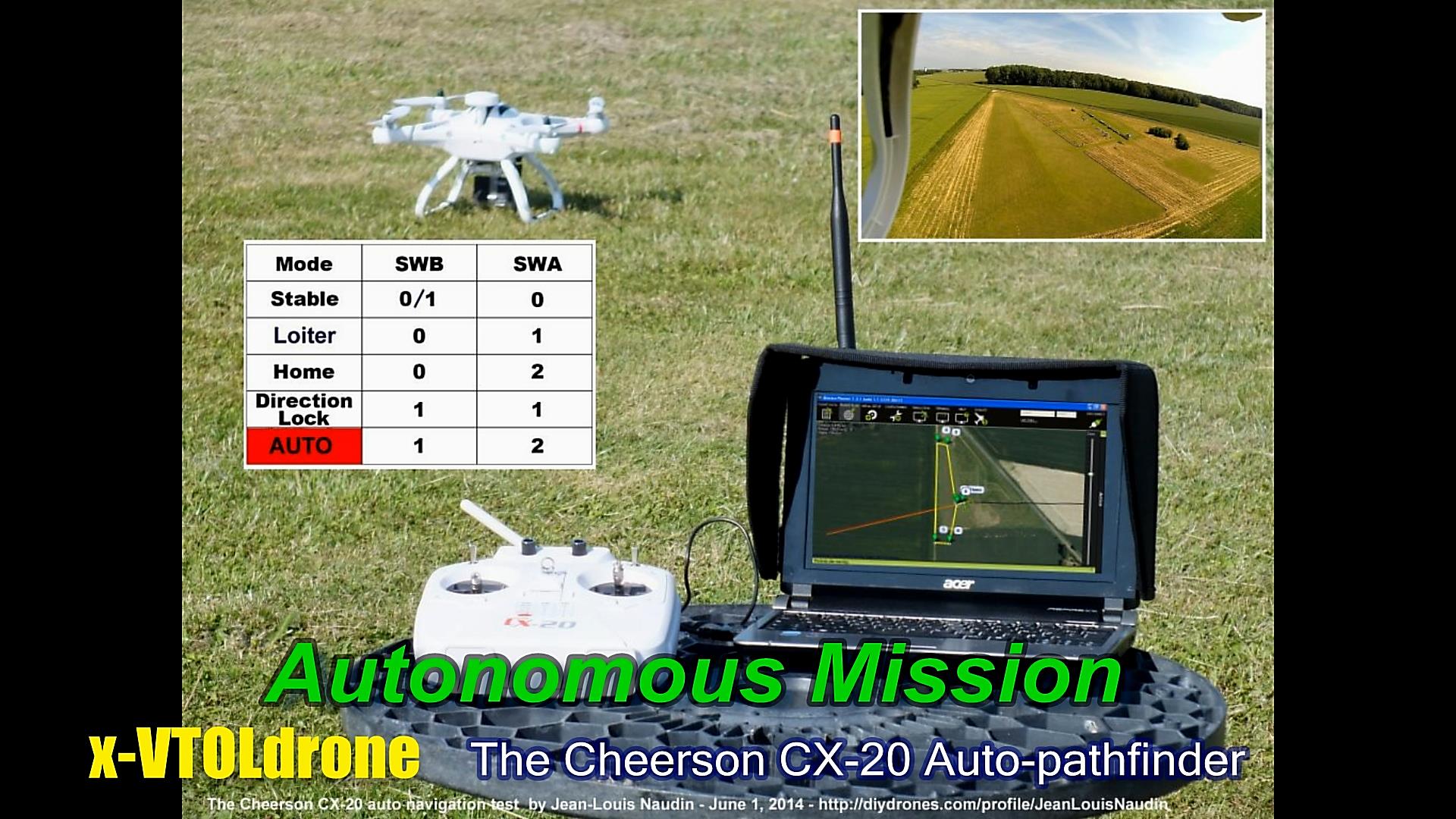
This is a test of a FULL AUTONOMOUS MISSION under flight plan (in Mode AUTO) with the Cheerson CX-20 (Quanum NOVA).
-
The ALTHOLD flight mode (factory default) of the CX-20 has been changed into the AUTO mode with the mission planner.


-
The WP_YAW_BEHAVIOR parameter has also been changed to 2 so as the CX-20 heading is locked towards the next Waypoint. With this feature enabled, the on board GoPro 3 camera is able to look forward during the flight. There is no Gimball stabilization in this test setup.

A flight plan (FPL) of 8 waypoints has been uploaded to the CX-20 autopilot (an APM v2.5.2 loaded with the firmware ArduCopter v3.1.2) and then the AUTO mode has been enabled.


The Take Off and the Landing sequence is fully automated. There is no action of the pilot during all the flight until the stop of the motors. All the flight is fully automated.

The factory PID parameters successfully tested in flight

- The full PID parameters files can be found at:
https://github.com/jlnaudin/x-VTOLdrone/blob/master/param/CX20_PID_factory.param
To download the parameters file, mouse right-clic on RAW button
- FULL AUTO MISSION TEST VIDEO

The VIDEO of the full auto mission flight with the CX-20 and filmed from the GoPro 3:
NEXT CHAPTER: INSIDE the CX-20