PI Boot Flow - jljusten/tianocore GitHub Wiki
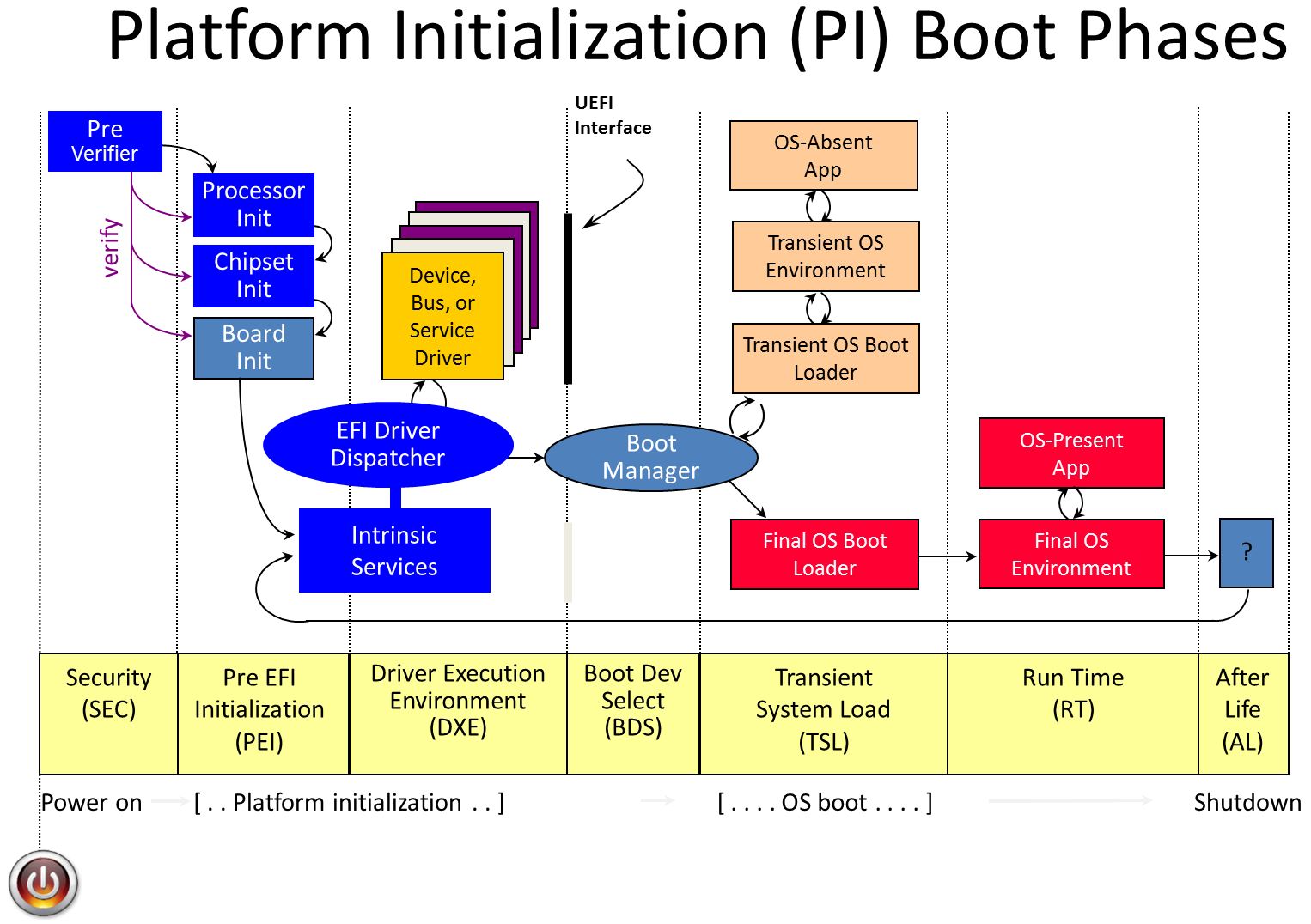
Security (SEC) Phase
The Security (SEC) phase is the first phase in the PI Architecture architecture and is responsible for
the following:
- Handling all platform restart events
- Creating a temporary memory store
- Serving as the root of trust in the system
- Passing handoff information to the PEI Core
Pre-EFI Initialization (PEI) Phase
The Pre-EFI Initialization (PEI) phase of the PI Architecture specifications (hereafter referred to as
the “PI Architecture”) is invoked quite early in the boot flow. Specifically, after some preliminary
processing in the Security (SEC) phase, any machine restart event will invoke the PEI phase.
The PEI phase will initially operate with the platform in a nascent state, leveraging only onprocessor
resources, such as the processor cache as a call stack, to dispatch Pre-EFI Initialization
Modules (PEIMs).
These PEIMs are responsible for the following:
- Initializing some permanent memory complement
- Describing the memory in Hand-Off Blocks (HOBs)
- Describing the firmware volume locations in HOBs
- Passing control into the Driver Execution Environment (DXE) phase
The PEI phase is also responsible for crisis recovery and resuming from the S3 sleep state. For crisis recovery, the PEI phase should reside in some small, fault-tolerant block of the firmware store. As a result, it is imperative to keep the footprint of the PEI phase as small as possible. In addition, for a successful ACPI S3 resume, the speed of the resume is of utmost importance, so the code path through the firmware should be minimized. These two boot flows also speak to the need to keep the processing and code paths in the PEI phase to a minimum.
The implementation of the PEI phase is more dependent on the processor architecture than any other phase. In particular, the more resources the processor provides at its initial or near initial state, the richer the interface between the PEI Foundation and PEIMs. As such, there are several parts of the following discussion that note requirements on the architecture but are otherwise left architecturally dependent.
UEFI.org -PI VOLUME 1: Platform Initialization Specification 1.2 Pre-EFI Initialization Core Interface
Driver eXecution Environment (DXE) Phase
The Driver Execution Environment (DXE) phase is where most of the system initialization is performed. Pre-EFI Initialization (PEI), the phase prior to DXE, is responsible for initializing permanent memory in the platform so that the DXE phase can be loaded and executed. The state of the system at the end of the PEI phase is passed to the DXE phase through a list of position-independent data structures called Hand-Off Blocks (HOBs). HOBs are described in detail in the Platform Initialization Hand-Off Block Specification.
There are several components in the DXE phase:
- “DXE Foundation”
- “DXE Dispatcher”
- A set of “DXE Drivers”
UEFI.org -PI VOLUME 2: Platform Initialization Specification 1.2 Driver Execution Environment Core Interface
Boot Device Selection (BDS) Phase
The Boot Manager in DXE executes after all the DXE drivers whose dependencies have been satisfied have been dispatched by the DXE Dispatcher. At that time, control is handed to the Boot Device Selection (BDS) phase of execution. The BDS phase is responsible for implementing the platform boot policy. System firmware that is compliant with this specification must implement the boot policy specified in the Boot Manager chapter of the UEFI 2.0 specification. This boot policy provides flexibility that allows system vendors to customize the user experience during this phase of execution.
The Boot Manager must also support booting from a short-form device path that starts with the first node being a firmware volume device path. The boot manager must use the GUID in the firmware volume device node to match it to a firmware volume in the system. The GUID in the firmware volume device path is compared with the firmware volume name GUID. If a match is made, then the firmware volume device path can be appended to the device path of the matching firmware volume and normal boot behavior can then be used.
The BDS phase is implemented as part of the BDS Architectural Protocol. The DXE Foundation will hand control to the BDS Architectural Protocol after all of the DXE drivers whose dependencies have been satisfied have been loaded and executed by the DXE Dispatcher.
The BDS phase is responsible for the following:
- Initializing console devices
- Loading device drivers
- Attempting to load and execute boot selections
Transient System Load (TSL) Phase
TSL is the 1st stage of the boot process where the OS loader is an EFI application.
Run Time (RT) Phase
UEFI has a limited set of Runtime (RT) Services that are available after the Operating System boots and takes over the system. The primary runtime services enable the OS to read and write environment variables. There are also services that abstract the Real Time Clock, produce an monotonically increasing count, and support updates of firmware components via capsules.
It is legal for OS to call UEFI runtime services using virtual addressing, so some of the runtime services are involved in making sure the code is callable from a given virtual address space. Making a virtual call is a one way gate, and the OS must request virtual calling when it boots and provide the firmware with the virtual mappings for the physical addresses required by the runtime firmware. The firmware then fixes it self up so that the next call can be made from the virtual address space. Due to this complexity of managing virtual calling runtime code in UEFI is usually isolated into runtime only drivers.
After Life (AF) Phase
After the Operating System takes over from the BDS via its boot (TSL), only a small set of UEFI is left behind. If the hardware or OS crashes, firmware could try and implement some form of recovery or remediation action. This is the After life. UEFI and PI do not spec any required behavior in this phase.
See Acronyms for glossary and acronym information.