_SKU_SER0006_DF9GMS_180°_微型舵机 - jimaobian/DFRobotWikiCn GitHub Wiki
)")
由DFRobot 出品的DF9GMS 180°微型舵机,该舵机采用高强度ABS透明外壳配以内部高精度尼龙齿轮组,加上精准的控制电路、高档轻量化空心杯电机使该微型舵机的重量只有9克,而输出力矩达到了惊人的1.6kg*cm。
工作电压:4.8V 转矩:1.6kg/cm(4.8V) 速度:0.14秒/60度(4.8V) 使用温度:-30~+60摄氏度 死区宽度:5微秒 外形尺寸:23x12.2x29mm 重量:9g
-
硬件
- 1 x Arduino UNO控制板
- 1 x DF9GMS 180° 微型舵机
- 若干 杜邦线

-
软件
- Arduino IDE (根据能够使用的Arduino版本来选择,不要盲目追求最新版本), 点击下载Arduino IDE
/*******************************
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
1、下载及安装软件。下载地址:http://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程
3、“扩展”中选择“主控板”中的“Arduino Uno”,“执行器”中加载“舵机模块”。 详细教程:Mind+基础wiki教程-加载扩展库流程
4、进行编程,程序如下图:
5、菜单“连接设备”,“上传到设备”
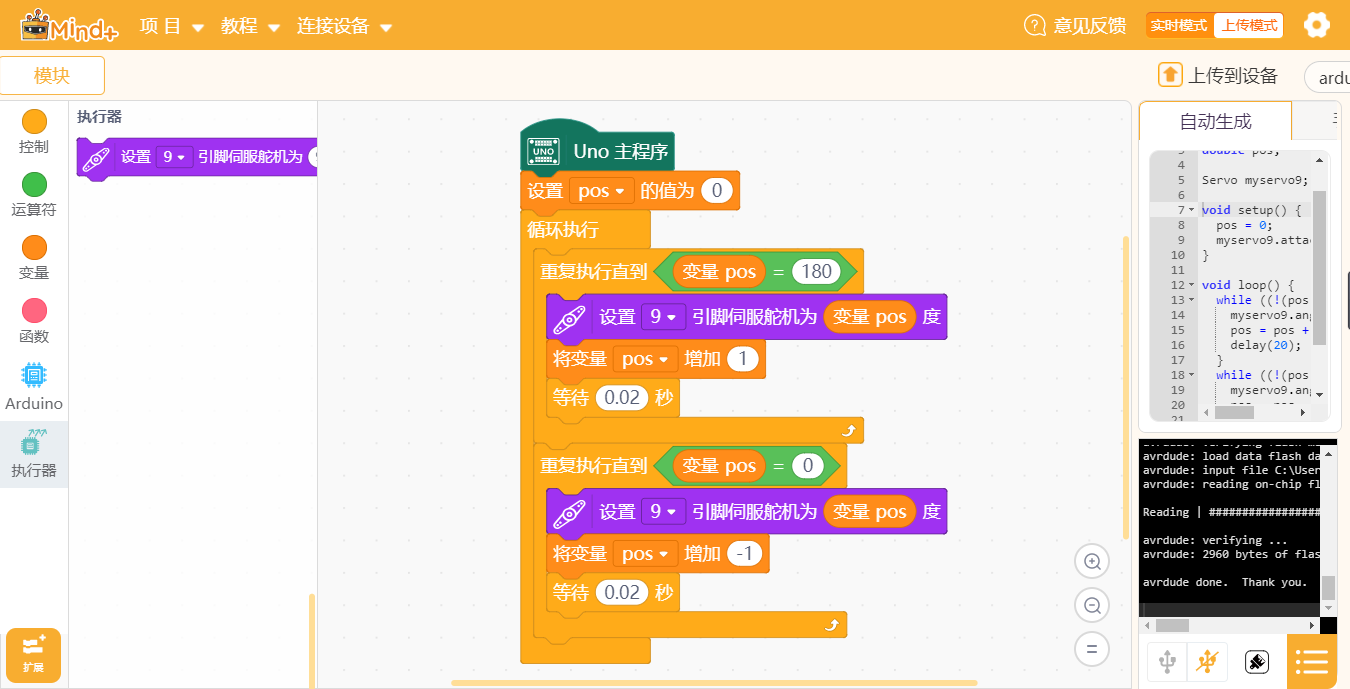
代码上传完成后,舵机从0度到180度再到0度循环转动。
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
 购买
购买