_SKU_DRI0044_Dual_Motor_Driver__TB6612__微型电机驱动模块 - jimaobian/DFRobotWikiCn GitHub Wiki

DFRobot微型双路直流电机驱动基于TB6612FNG驱动IC设计,采用特殊逻辑控制方式,仅需4根管脚即可实现双路电机控制,相比纯芯片而言,减少了两个IO管脚,为Arduino等控制器节约了宝贵的IO资源,可以应用在更多领域中。 TB6612FNG是一块双路全桥驱动芯片,单通道最大连续驱动电流可达1.2A,峰值2A/3.2A(连续脉冲/单脉冲),可驱动一些微型直流电机。控制逻辑与L298N类似,代码上可直接兼容DFRobot L298N电机驱动。标准XH2.54排针可直插面包板,无论是DIY制作,还是新产品开发,都是非常理想的一个选择!
- 逻辑部分输入电压VCC:3.3~5V
- 驱动部分输入电压VM:2.5~12V
- 驱动电机路数:2通道
- 单通道最大连续驱动电流:1.2A
- 启动峰值:2A/3.2A(连续脉冲/单脉冲)
- 接口方式:2.54mm间距排针
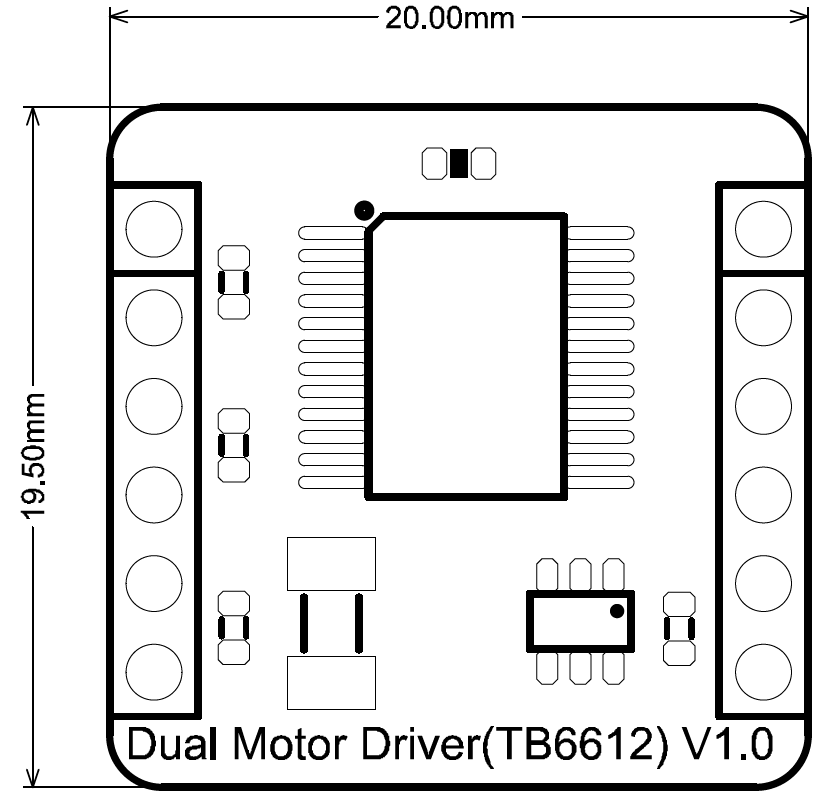
- 模块尺寸:20 × 19.5(mm)
| | |
| ------------------------------------------------------------- | |
|
:
| 标号 | 名称 | 功能描述 |
| 1 | DIR1 | 电机M1的方向控制引脚 |
| 2 | PWM1 | 电机M1的速度控制引脚 |
| 3 | PWM2 | 电机M2的速度控制引脚 |
| 4 | DIR2 | 电机M2的方向控制引脚 |
| 5 | GND | 逻辑部分电源负极 |
| 6 | VCC | 逻辑部分电源正极 |
| 7 | M1+ | M1路电机输出1 |
| 8 | M1- | M1路电机输出2 |
| 9 | M2+ | M2路电机输出1 |
| 10 | M2- | M2路电机输出2 |
| 11 | GND | 电机电源负极 |
| 12 | VM(<12V) | 电机电源正极 |
管脚映射
- 电机接口:M1,M2 可接入两个电机,其中标注了“+”、“-”表示两个电机的接线方向。
- 指示灯:正面指示灯:电源指示灯
- 电源部分

-
- VCC:逻辑电源输入,输入电压为5V;
- VM:电机驱动电源输入,输入电压范围建议为3.7~12V;
- GND:逻辑电源和电机驱动电源的公共地。
-
电机控制端口
- PWM1,PWM2:分别为两个电机控制的使能端(可使用PWM调速)
- DIR1,DIR2:正反转控制信号输入端。比如,DIR1=1,M1电机正转; DIR1=0,M1电机反转。
注: LOW = 0; HIGH = 1; PWM = 0~255
这个简单实例告诉你如何使用TB6612电机驱动板驱动两个直流电机。
-
硬件
- UNO x1
- TB6612微型电机驱动模块 x1
- 杜邦线 若干
-
软件
- Arduino IDE 版本1.6.8 点击下载Arduino IDE

int PWM1 = 5;
int DIR1 = 4;
int PWM2 = 6;
int DIR2 = 7;
void setup()
{
pinMode(DIR1, OUTPUT);
pinMode(DIR2, OUTPUT);
}
void loop()
{
int value;
for(value = 0 ; value <= 255; value+=5)
{
digitalWrite(DIR1,HIGH);
digitalWrite(DIR2, HIGH);
analogWrite(PWM1, value); //PWM调速
analogWrite(PWM2, value); //PWM调速
delay(30);
}
}
1、下载及安装软件。下载地址:http://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装 2、切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程 3、“扩展”中选择“主控板”中的“Arduino Uno”。 详细教程:Mind+基础wiki教程-加载扩展库流程 4、进行编程,程序如下图: 5、菜单“连接设备”,“上传到设备”

两个电机速度由0变到最大,循环
PWM调速是通过调整空占比来模拟不同电压值,从而控制加到电机两端的电压高低来实现调速。

更多问题及有趣的应用,请访问论坛

{kind=link}