_SKU_DFR0094_IR_Receiver_Module红外接收模块 - jimaobian/DFRobotWikiCn GitHub Wiki
")
1、什么是红外接收头?
红外遥控器发出的信号是一连串的二进制脉冲码。为了使其在无线传输过程中免受其他红外信号的干扰,通常都是先将其调制在特定的载波频率上, 然后再经红外发射二极管发射出去,而红外线接收装置则要滤除其他杂波,只接收该特定频率的信号并将其还原成二进制脉冲码,也就是解调.
2、工作原理
内置接收管将红外发射管发射出来的光信号转换为微弱的电信号,此信号经由IC内部放大器进行放大,然后通过自动增益控制、带通滤波、解调变、 波形整形后还原为遥控器发射出的原始编码,经由接收头的信号输出脚输入到电器上的编码识别电路。
3、红外接收头的引脚与连线
红外接收头有三个引脚如下图:
D为数据输出
GND为电源地
VCC为电源正

1、实验器件 红外遥控器 1个 IR Receiver Module 1个 数字传感器连接线 1根
2、实验原理 要想对某一遥控器进行解码必须要了解该遥控器的编码方式,这就叫知己知彼,百战不殆 。本产品使用的遥控器的编码方式为:NEC协议。下面就介绍一下NEC协议:
•NEC协议介绍:
特点: (1)8位地址位,8位命令位
(2)为了可靠性地址位和命令位被传输两次
(3)脉冲位置调制
(4)载波频率38khz
(5)每一位的时间为1.125ms或2.25ms
•逻辑0和1的定义如下图:

协议如下:
•按键按下立刻松开的发射脉冲:

上面的图片显示了NEC的协议典型的脉冲序列。注意:这是首先发送LSB(最低位)的协议。在上面的脉冲传输的地址为0x59命令为0x16。一个消息是由一个9ms的高电平开始,随后有一个4.5ms的低电平, (这两段电平组成引导码)然后由地址码和命令码。地址和命令传输两次。第二次所有位都取反,可用于对所收到的消息中的确认使用。总传输时间是恒定的,因为每一点与它取反长度重复。如果你不感兴趣, 你可以忽略这个可靠性取反,也可以扩大地址和命令,以每16位!
•按键按下一段时间才松开的发射脉冲:

一个命令发送一次,即使在遥控器上的按键仍然按下。当按键一直按下时,第一个110ms的脉冲与上图一样,之后每110ms重复代码传输一次。这个重复代码是由一个9ms的高电平脉冲和一个2.25ms低电平和560μs的高电平组成。
•重复脉冲

本介绍是参考 http://www.sbprojects.com/knowledge/ir/nec.htm
注意:脉冲波形进入一体化接收头以后,因为一体化接收头里要进行解码、信号放大和整形,故要注意在没有红外信号时,其输出端为高电平,有信号时为低电平,故其输出信号电平正好和发射端相反。接收端脉冲大家可以通过示波器看到,结合看到的波形理解程序。
•本实验编程思想
根据NEC编码的特点和接收端的波形,本实验将接收端的波形分成四部分:引导码(9ms和4.5ms的脉冲)、地址码16位(包括8位的地址位和8位的地址的取反)、命令码16位(包括8位命令位和8位命令位的取反)、重复码(9ms、2.25ms、560us脉冲组成)。 利用定时器对接收到的波形的高电平段和低电平段进行测量,根据测量到的时间来区分:逻辑“0”、逻辑“1”、引导脉冲、重复脉冲。引导码和地址码只要判断是正确的脉冲即可,不用存储,但是命令码必须存储,因为每个按键的命令码都不同, 根据命令码来执行相应的动作。设置遥控器上的几个按键VOL+:控制LED灯亮的;VOL-:作为控制蜂鸣器响;
程序功能:对遥控器发射出来的编码脉冲进行解码,根据解码结果执行相应的动作。按下"VOL+"红灯亮,松开红灯灭;按下"VOL-"蜂鸣器响,松开蜂鸣器停止响;这样大家就可以用遥控器遥控你的器件了,让它听你的指挥。其它按键的译码方式与这几个键一样,只要大家用示波器测出它们各自的波形,了解各自的命令码,在执行译码结果的函数中写上对应的命令码和要执行的动作即可。
#define BUZZER 10//蜂鸣器
#define LED_RED 11//红灯
#define IR_IN 2 //红外接收
int Pulse_Width=0;//存储脉宽
int ir_code=0x00;//命令值
void timer1_init(void)//定时器初始化函数
{
TCCR1A = 0X00;
TCCR1B = 0X05;//给定时器时钟源
TCCR1C = 0X00;
TCNT1 = 0X00;
TIMSK1 = 0X00; //禁止定时器溢出中断
}
void remote_deal(void)//执行译码结果函数
{
switch(ir_code)
{
case 0xff00://停止
digitalWrite(LED_RED,LOW);//红灯不亮
digitalWrite(BUZZER,LOW);//蜂鸣器不响
break;
case 0xfe01://VOL+
digitalWrite(LED_RED,HIGH);//红灯亮
break;
case 0xf609://VOL-
digitalWrite(BUZZER,HIGH);//蜂鸣器响
break;
}
}
char logic_value()//判断逻辑值“0”和“1”子函数
{
while(!(digitalRead(IR_IN))); //低等�
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=7&&Pulse_Width<=10)//低电平560us
{
while(digitalRead(IR_IN));//是高就等�
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=7&&Pulse_Width<=10)//接着高电平560us
return 0;
else if(Pulse_Width>=25&&Pulse_Width<=27) //接着高电平1.7ms
return 1;
}
return -1;
}
void pulse_deal()//接收地址码和命令码脉冲函数
{
int i;
//执行8个0
for(i=0; i<8; i++)
{
if(logic_value() != 0) //不是0
return;
}
//执行6个1
for(i=0; i<6; i++)
{
if(logic_value()!= 1) //不是1
return;
}
//执行1个0
if(logic_value()!= 0) //不是0
return;
//执行1个1
if(logic_value()!= 1) //不是1
return;
//解析遥控器编码中的command指令
ir_code=0x00;//清零
for(i=0; i<16;i++ )
{
if(logic_value() == 1)
{
ir_code |=(1<<i);
}
}
}
void remote_decode(void)//译码函数
{
TCNT1=0X00;
while(digitalRead(IR_IN))//是高就等�
{
if(TCNT1>=1563) //当高电平持续时间超过100ms,表明此时没有按键按下
{
ir_code = 0xff00;
return;
}
}
//如果高电平持续时间不超过100ms
TCNT1=0X00;
while(!(digitalRead(IR_IN))); //低等�
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=140&&Pulse_Width<=143)//9ms
{
while(digitalRead(IR_IN));//是高就等�
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=68&&Pulse_Width<=72)//4.5ms
{
pulse_deal();
return;
}
else if(Pulse_Width>=34&&Pulse_Width<=36)//2.25ms
{
while(!(digitalRead(IR_IN)));//低等�
Pulse_Width=TCNT1;
TCNT1=0;
if(Pulse_Width>=7&&Pulse_Width<=10)//560us
{
return;
}
}
}
}
void setup()
{
pinMode(LED_RED,OUTPUT);//设置与红灯连接的引脚为输出模式
pinMode(BUZZER,OUTPUT);//设置与蜂鸣器连接的引脚为输出模式
pinMode(IR_IN,INPUT);//设置红外接收引脚为输入
}
void loop()
{
timer1_init();//定时器初始化
while(1)
{
remote_decode(); //译码
remote_deal(); //执行译码结果
}
}
| 遥控器字符 | 键值 |
| 红色按钮 | 0xff00 |
| VOL+ | 0xfe01 |
| FUNC/STOP | 0xfd02 |
| 左2个三角 | 0xfb04 |
| 暂停键 | 0xfa05 |
| 右2个三角 | 0xf906 |
| 向下三角 | 0xf708 |
| VOL- | 0xf609 |
| 向上三角 | 0xf50a |
| 0 | 0xf30c |
| EQ | 0xf20d |
| ST/REPT | 0xf10e |
| 1 | 0xef10 |
| 2 | 0xee11 |
| 3 | 0xed12 |
| 4 | 0xeb14 |
| 5 | 0xea15 |
| 6 | 0xe916 |
| 7 | 0xe718 |
| 8 | 0xe619 |
| 9 | 0xe51a |
1、下载及安装软件。下载地址:http://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装 2、切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程 3、“扩展”中选择“主控板”中的“Arduino Uno”。 详细教程:Mind+基础wiki教程-加载扩展库流程 4、进行编程,程序如下图:(注意新建字符串变量,名称为“红外编码”) 5、菜单“连接设备”,“上传到设备”
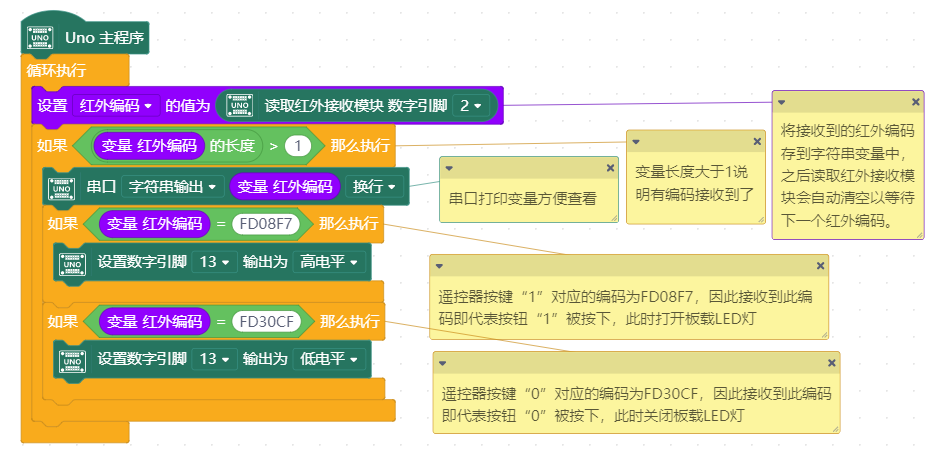
红外接收模块插板子D2口,按下遥控器按钮1打开板载LED灯,按下遥控器按钮0关闭板载LED灯。
| 遥控器字符 | 键值 |
| 红色按钮 | FD00FF |
| VOL+ | FD807F |
| FUNC/STOP | FD40BF |
| 左2个三角 | FD20DF |
| 暂停键 | FDA05F |
| 右2个三角 | FD609F |
| 向下三角 | FD10EF |
| VOL- | FD906F |
| 向上三角 | FD50AF |
| 0 | FD30CF |
| EQ | FDB04F |
| ST/REPT | FD708F |
| 1 | FD08F7 |
| 2 | FD8877 |
| 3 | FD48B7 |
| 4 | FD28D7 |
| 5 | FDA857 |
| 6 | FD6897 |
| 7 | FD18E7 |
| 8 | FD9867 |
| 9 | FD58A7 |
 购买
购买