数字触摸传感器__SKU_DFR0030_ - jimaobian/DFRobotWikiCn GitHub Wiki
")
概述
这是一个基于电容感应的触摸开关模块。人体或金属在传感器金属面上的直接触碰会被感应到。 除了与金属面的直接触摸,隔着一定厚度的塑料、玻璃等材料的接触也可以被感应到,感应灵敏度随接触面的大小和覆盖材料的厚度有关。 模块有4种输出模式,可使用跳线进行切换。 注意事项:使用时模块需要离固定面有一定高度,避免接触产生信号误差。
技术规格
- 工作电压:2.0~5.5V。
- 工作电流:低功耗模式下2.0uA,最大13.0uA。
- 最长相应时间:220ms。
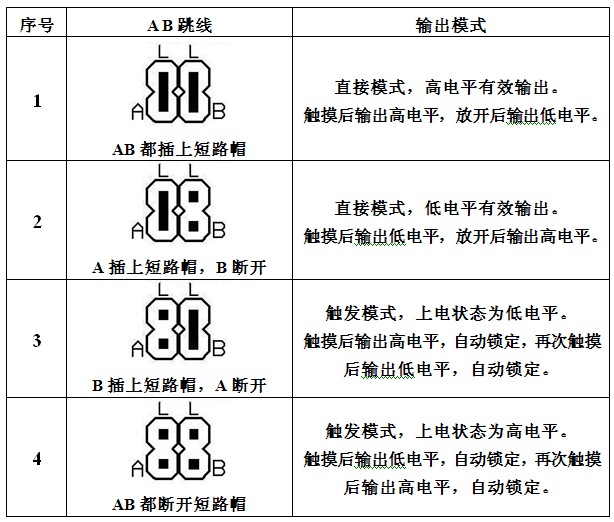
- 可提供四种工作模式。
- 直接模式,高电平有效输出。
- 直接模式,低电平有效输出。
- 触发模式,上电状态为0。
- 触发模式,上电状态为1。
- 4秒钟自动校准功能(当没有触摸按键时,每隔4秒钟自动校准一次)。
- 具有输出指示灯。
引脚定义
触摸传感器模块管脚定义:
- 输出
- 电源(VCC)
- 地(GND)

工作模式说明
版本说明
| 版本号 | 备注 |
| V1.0 | 设计第一版本 |
| V1.1 | 增加输出模式选择跳线 |
连接示意图

示例代码
触摸传感器设置为第一模式。
int ledPin = 13; // Connect LED on pin 13, or use the onboard one
int KEY = 2; // Connect Touch sensor on Digital Pin 2
void setup()
{
pinMode(ledPin, OUTPUT); // Set ledPin to output mode
pinMode(KEY, INPUT); //Set touch sensor pin to input mode
}
void loop()
{
if(digitalRead(KEY)==HIGH) //Read Touch sensor signal
{
digitalWrite(ledPin, HIGH); // if Touch sensor is HIGH, then turn on
}
else
{
digitalWrite(ledPin, LOW); // if Touch sensor is LOW, then turn off the led
}
}
 购买 DFRobot数字触摸传感器(SKU:DFR0030)
购买 DFRobot数字触摸传感器(SKU:DFR0030)
category: Product Manual category: DFR Series category: Sensors category:source category:Diagram