Servo SG90 - javierre/nodemcu GitHub Wiki

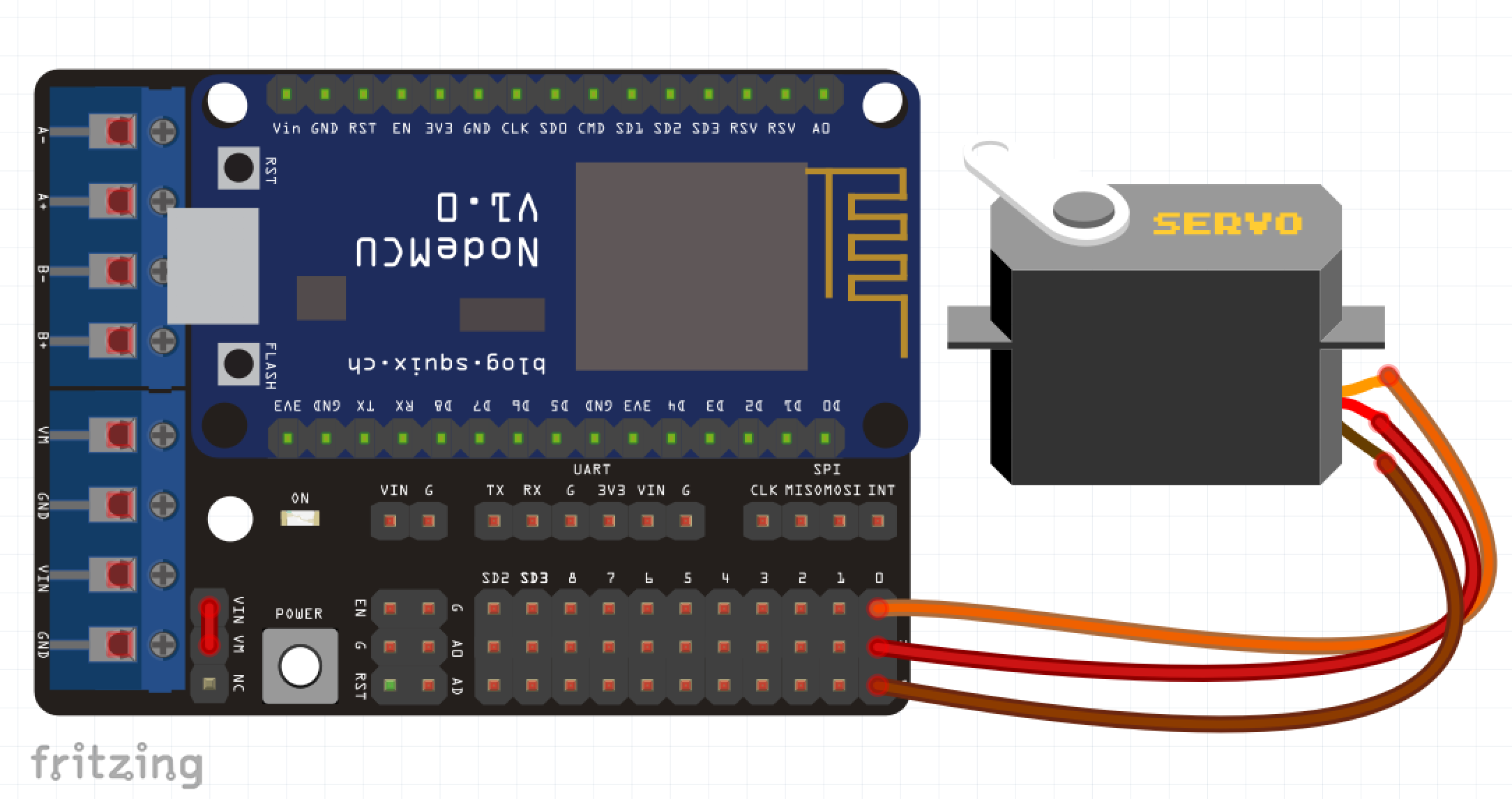
Los servomotores son motores que, normalmente, se mueven en un rango de 180º, permitiendo cierta precisión en el movimiento. Para ello desde nuestra placa indicamos al motor la posición a la que debe moverse mediante el comando servoMotor.write(angulo);. No podemos controlar la velocidad de movimiento. Para indicar en qué pin se encuentra el motor debemos indicarlo mediante servoMotor.attach(pin);.
/*
Creado: Luis del Valle ([email protected])
https://programarfacil.com
*/
// Incluímos la librería para poder controlar el servo
#include <Servo.h>
// Declaramos la variable para controlar el servo
Servo servoMotor;
void setup() {
// Iniciamos el monitor serie para mostrar el resultado
Serial.begin(9600);
// Iniciamos el servo para que empiece a trabajar con el pin D7
servoMotor.attach(D0);
}
void loop() {
// Desplazamos a la posición 0º
servoMotor.write(0);
// Esperamos 1 segundo
delay(1000);
// Desplazamos a la posición 90º
servoMotor.write(90);
// Esperamos 1 segundo
delay(1000);
// Desplazamos a la posición 45
servoMotor.write(45);
// Esperamos 1 segundo
delay(1000);
}