#include <Wire.h>
/* Define declination of location from where measurement going to be done.
e.g. here we have added declination from location Pune city, India.
we can get it from http://www.magnetic-declination.com */
#define Declination -0.00669
#define hmc5883l_address 0x1E
void setup() {
Serial.begin(9600); /* begin serial for debug */
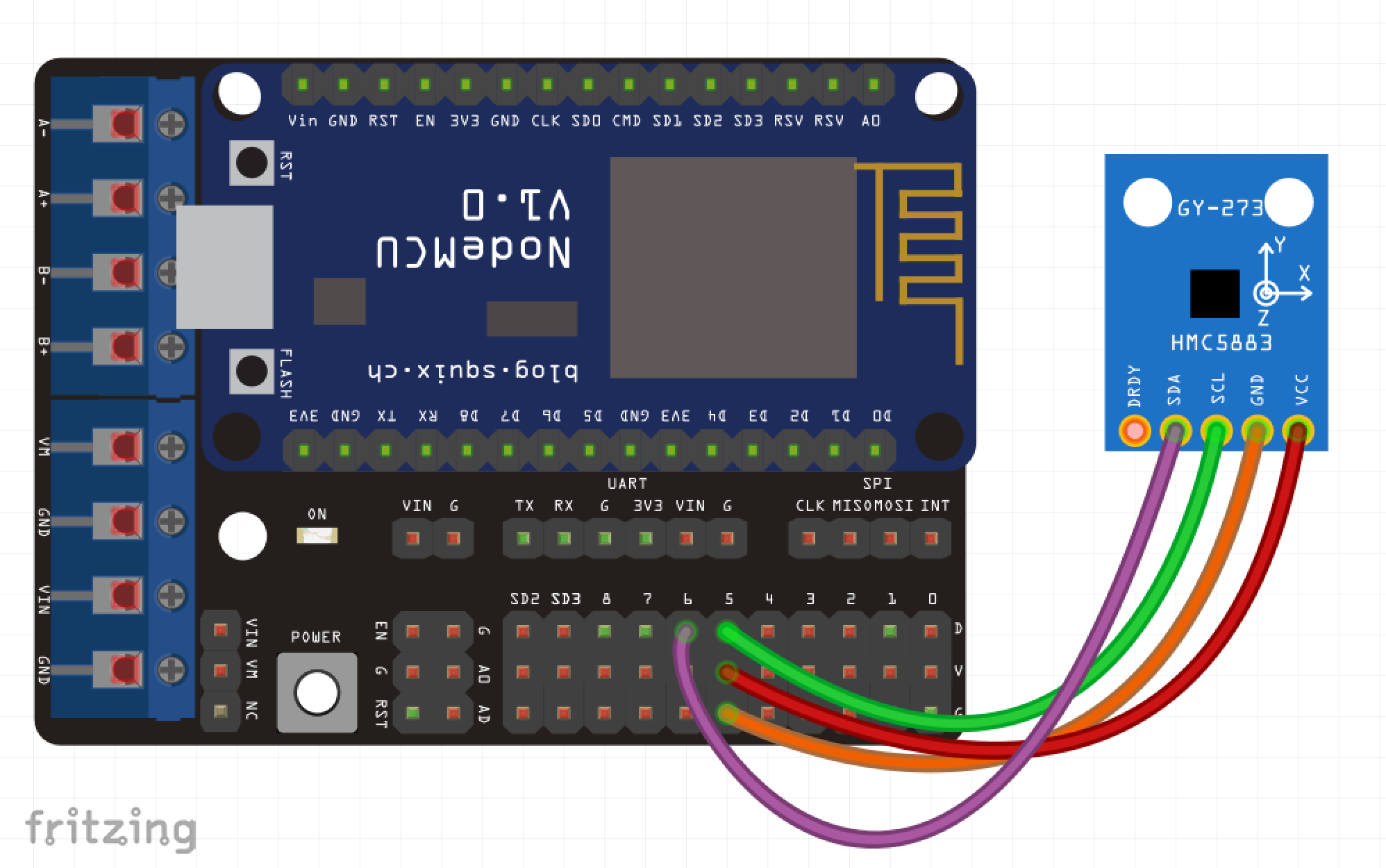
Wire.begin(D6, D5); /* join i2c bus with SDA=D6 and SCL=D5 of NodeMCU */
hmc5883l_init();
}
void loop() {
Serial.print("Heading Angle : ");
Serial.println(hmc5883l_GetHeading());
delay(150);
}
void hmc5883l_init(){ /* Magneto initialize function */
Wire.beginTransmission(hmc5883l_address);
Wire.write(0x00);
Wire.write(0x70); //8 samples per measurement, 15Hz data output rate, Normal measurement
Wire.write(0xA0); //
Wire.write(0x00); //Continuous measurement mode
Wire.endTransmission();
delay(500);
}
int hmc5883l_GetHeading(){
int16_t x, y, z;
double Heading;
Wire.beginTransmission(hmc5883l_address);
Wire.write(0x03);
Wire.endTransmission();
/* Read 16 bit x,y,z value (2's complement form) */
Wire.requestFrom(hmc5883l_address, 6);
x = (((int16_t)Wire.read()<<8) | (int16_t)Wire.read());
z = (((int16_t)Wire.read()<<8) | (int16_t)Wire.read());
y = (((int16_t)Wire.read()<<8) | (int16_t)Wire.read());
Heading = atan2((double)y, (double)x) + Declination;
if (Heading>2*PI) /* Due to declination check for >360 degree */
Heading = Heading - 2*PI;
if (Heading<0) /* Check for sign */
Heading = Heading + 2*PI;
return (Heading* 180 / PI);/* Convert into angle and return */
}
/* Uncomment below function for reading status register */
//uint8_t readStatus(){
// Wire.beginTransmission(hmc5883l_address);
// Wire.write(0x09);
// Wire.endTransmission();
// Wire.requestFrom(hmc5883l_address, 1);
// return (uint8_t) Wire.read();
//}