Importing Whole Body Controller Core Project - ihmcrobotics/ihmc-open-robotics-software-tutorials GitHub Wiki
Import the whole-body-controller-core project
Open Eclipse and go to the Java perspective. In the top right corner of the screen click on the button:  .
.
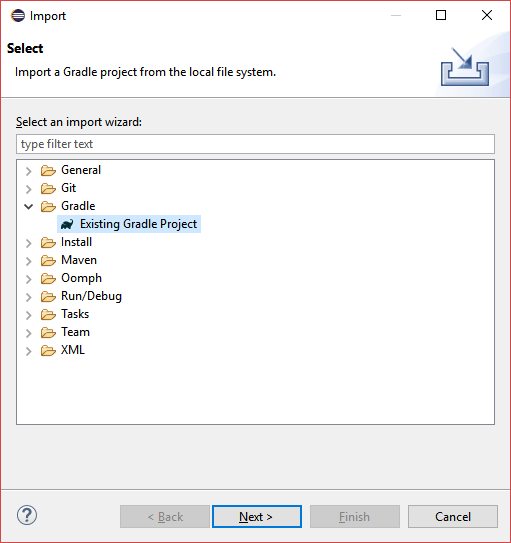
Go to: File -> Import... In the new window, select existing Gradle Project:
When prompted for the Project root directory select the Browse option.
IMPORTANT: Select the folder whole-body-controller-core inside the ihmc-open-robotics-software-tutorials folder inside your eclipse workspace folder:

Click Next. Ensure Override workspace settings is unchecked (the Specific Gradle version should be grayed out, note that the version may differ sometimes, it is fine).

Click Next again and then Finish. We use Gradle to manage our dependencies, meaning that it will find and download the Jars (compiled Java libraries) required for the project and automatically set them up. This might take several minutes. At the bottom right corner of the IDE, you can see that Gradle is setting up the project in the background. Once the progression bar is gone, your Package Explorer view should look like this:

Now that all the examples for this tutorial set are imported, it's time to start looking at the them, starting with Example 1: Robot Arm Simulation with Regular PD Controller!