conf - guillaume-rico/kkdrone GitHub Wiki
Introduction
Le drone est enfin monté, le code chargé. On peut commencer la configuration. ATTENTION:il est clairement préférable d'effectuer les étapes suivantes sans les hélices
- Min Max moteur
- Inversion Accéléromètre
- Réglage PID
Sens de rotation des moteurs
Les moteurs doivent tourner dans le sens décrit ci-dessous:
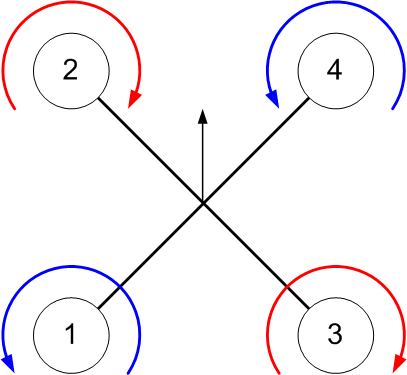
Si le moteur ne tourne pas dans le bon sens, inverser deux des trois fils qui l'alimentent.
Réglage des potentiomètres
Le réglage des potentiomètres permet de définir les coefficients de régulation pour le vol.
Nous vous conseillons les coefficients suivants: 25% - 50% - 25%
En sachant que le 0 % est a fond en tournant le potentiomètre dans le sens anti-horaire.
Min Max Moteur
- Mettre le potentiomètre "Yaw" à 0 (a fond sens antihoraire)
- Mettre le stick des gaz dans la position la plus haute (A fond)
- Allumer la télécommande
- Brancher la batterie du coptere
- Musique de lancement des moteurs (1-2-3)
- Attendre un bip court (cette séquence peut changer en fonction des ESCs)
- Suivi (1 seconde après) de 2 bip court (cette séquence peut changer en fonction des ESCs)
- Mettre les gaz à zéro
- 3 bips court puis 1 bip long (cette séquence peut changer en fonction des ESCs)
- Le min et max des gaz est enregistré dans les ESCs. En manipulant la commande des gaz vous pouvez changer la vitesse de rotation des moteurs.
- Débrancher la batterie du quadcoptere.
- Remettre le gain du Yaw
Inversion Gyroscope
Il est souvent indispensable après une nouvelle installation de devoir inverser la réponse d'un des trois accéléromètre.
Pour savoir si un axe de correction est mauvais:
- Enlever les hélices!!!
- Brancher la batterie puis armer votre carte
- Augmenter très légèrement les gaz pour obtenir un faible vitesse de rotation
- Prendre le drone en main et amener deux bras motorisé de part et d'autre de votre tête
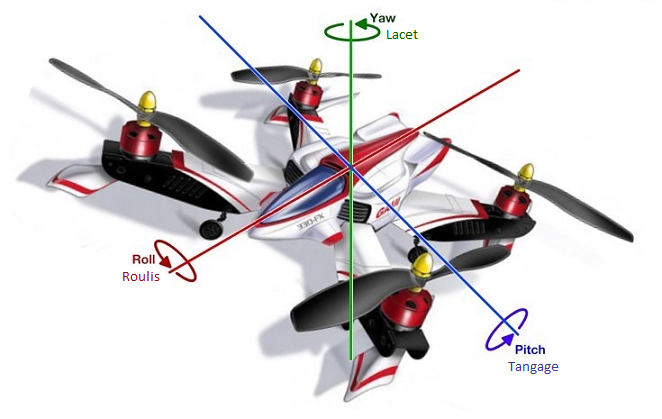
- Vérification du gyroscope du Pitch (tangage):
- Pencher le quad vers l'avant
- Les deux moteurs de devant doivent accélérer et les deux moteurs de derrière doivent ralentir
- Si ce n'est pas le cas, le gyroscope est à l'envers
- Vérification du gyroscope du Roll (roulis):
- Pencher le quad vers la gauche
- Les deux moteurs de gauche doivent accélérer et les deux moteurs de droite doivent ralentir
- Si ce n'est pas le cas, le gyroscope est à l'envers
- Vérification du gyroscope du Yaw (lacet):
- Tourner le quad sur lui même
- Les deux moteurs qui tourne dans le même sens doivent accélérer et les deux autres ralentir
- Si ce n'est pas le cas, le gyroscope est à l'envers
- Inversion des gyroscopes. Pour chaque gyroscope à l'envers
- Débrancher la batterie
- Mettre le potentiomètre du Roll à 0 (a fond sens antihoraire)
- Brancher la batterie.
- La LED bleue clignote trois fois.
- Pousser le stick correspondant à l'axe du gyro que vous souhaiter inverser.
- la LED doit clignoter indéfiniment
- Débrancher la batterie
- Restaurer la valeur du potentiomètre Roll.
Dans notre config actuelle, il n'y aucun gyro a inverser.