Using the Polargraph software with RAMPS motorshield - euphy/polargraph GitHub Wiki
RAMPS is a shield for Arduino MEGA, that has space for up to five motor drivers. It was designed for 3D printers, and is in very widespread use. Here is a page about it. The Polarshield is actually based loosely on RAMPS, and uses the same kind of motor drivers, so it is easy to get running.
Using the polargraph_server_polarshield firmware, edit the motherboard config lines and making them so:
#ifndef MOTHERBOARD
//#define MOTHERBOARD POLARSHIELD
#define MOTHERBOARD RAMPS14
#endif
And also comment out this [line activating the touchscreen.] (https://github.com/euphy/polargraph_server_polarshield/blob/master/polargraph_server_polarshield.ino#L85)
//#define USE_LCD
###Motor assignations
- Motor A (left hand) is on the driver for E1, extruder 1.
- Motor B (right hand) is on the driver for the Y axis.
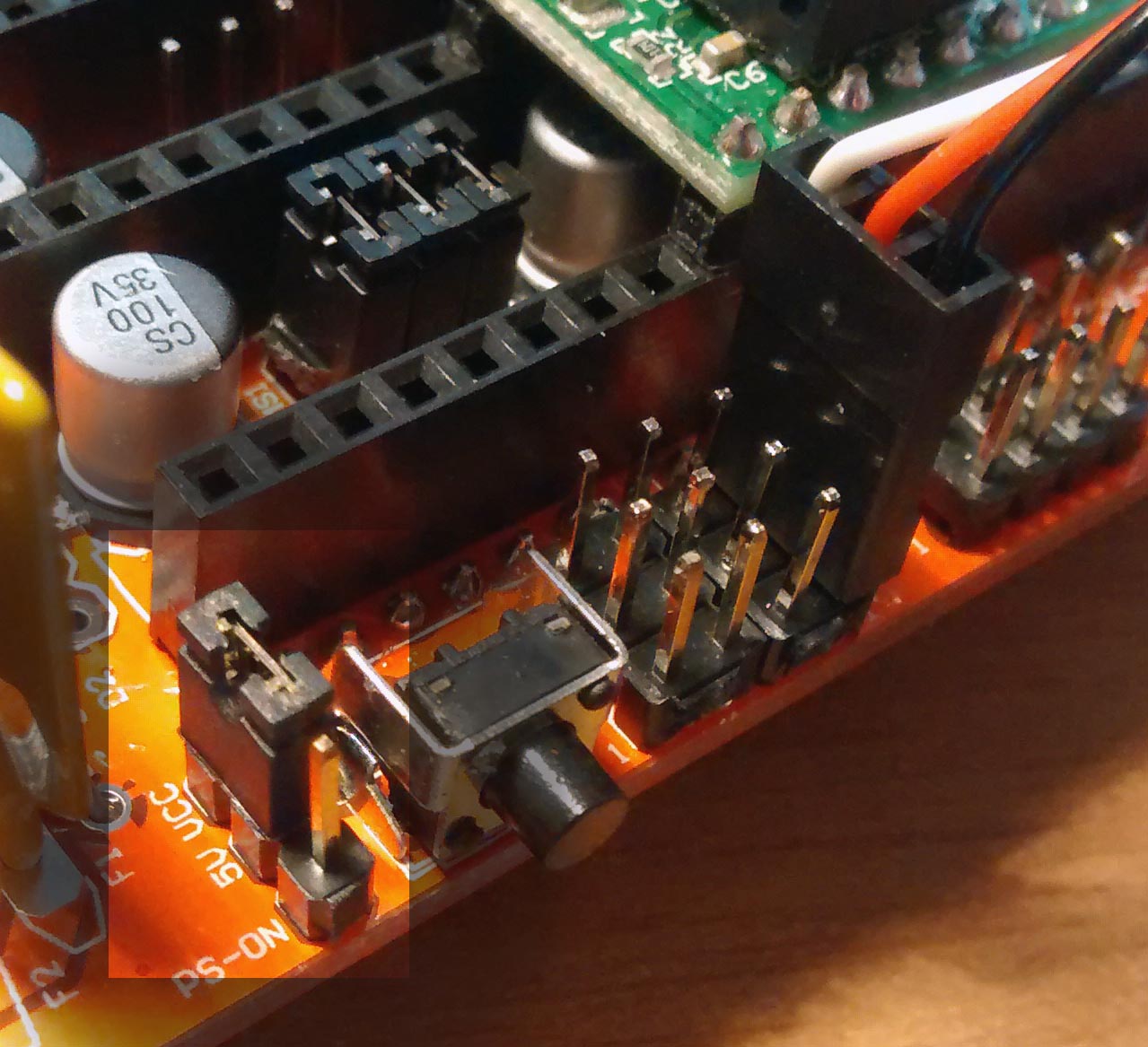
###Servo pins Remember, the servo pins are not wired to the power by default, so you need to put a jumper or a link between VCC and +5, right next to the reset button on RAMPS. [source] (http://forums.reprap.org/read.php?219,256377)
This page is to collect the wisdom of those experimenting in this area.
Mostly based on this forum thread.
| motor pin name | RAMPS pin | Polarshield pin |
|---|---|---|
| Motor A enable | D30 | D3 |
| Motor A step | D36 | D4 |
| Motor A dir | D34 | D5 |
| Motor B enable | D56 | D6 |
| Motor B step | D60 | D7 |
| Motor B dir | D61 | D8 |
| Servo 1 | D4 | D9 |
RAMPS pin numbers taken from ErikZalm's Marlin firmware.
Note: There seem to exist different batches of RAMPS1.4 with pin numbers slightly changed. The test script for RAMPS1.4 is very useful to find out correct pin assignments.