Gyro - dtex/johnny-five GitHub Wiki

The Gyro class constructs objects that represent a single Gyro sensor attached to the physical board.
We currently support two kinds of Gyros:
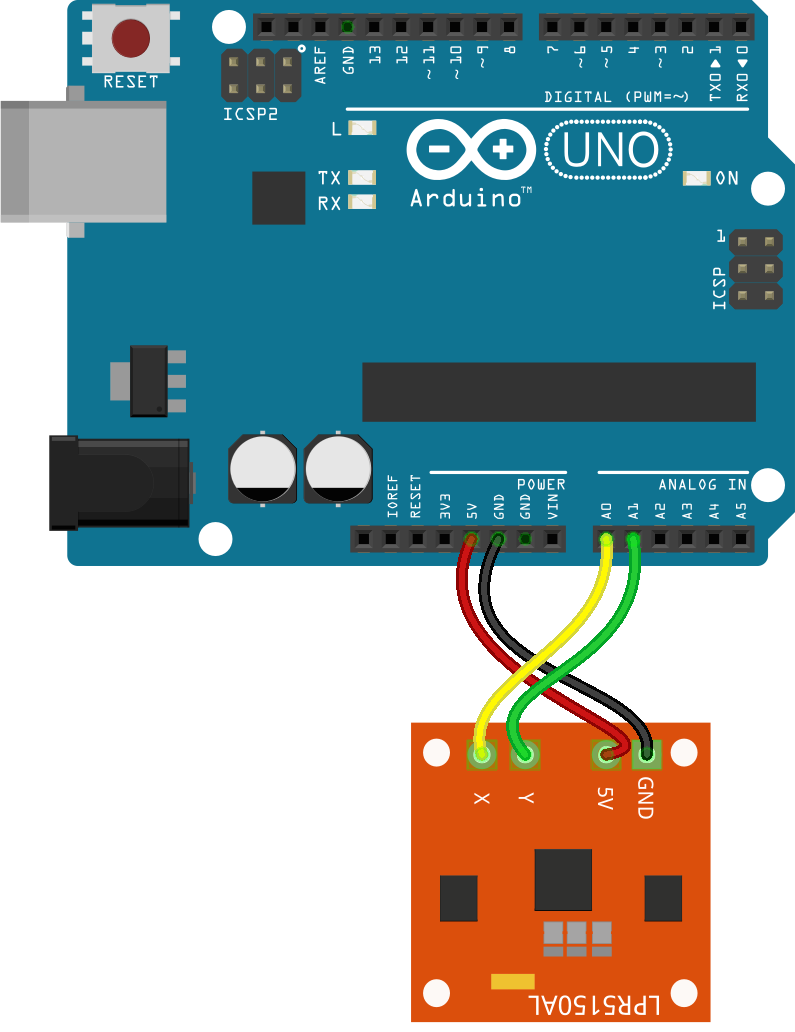
- LPR5150 (Analog)
- Used on the TinkerKit Gyro breakout
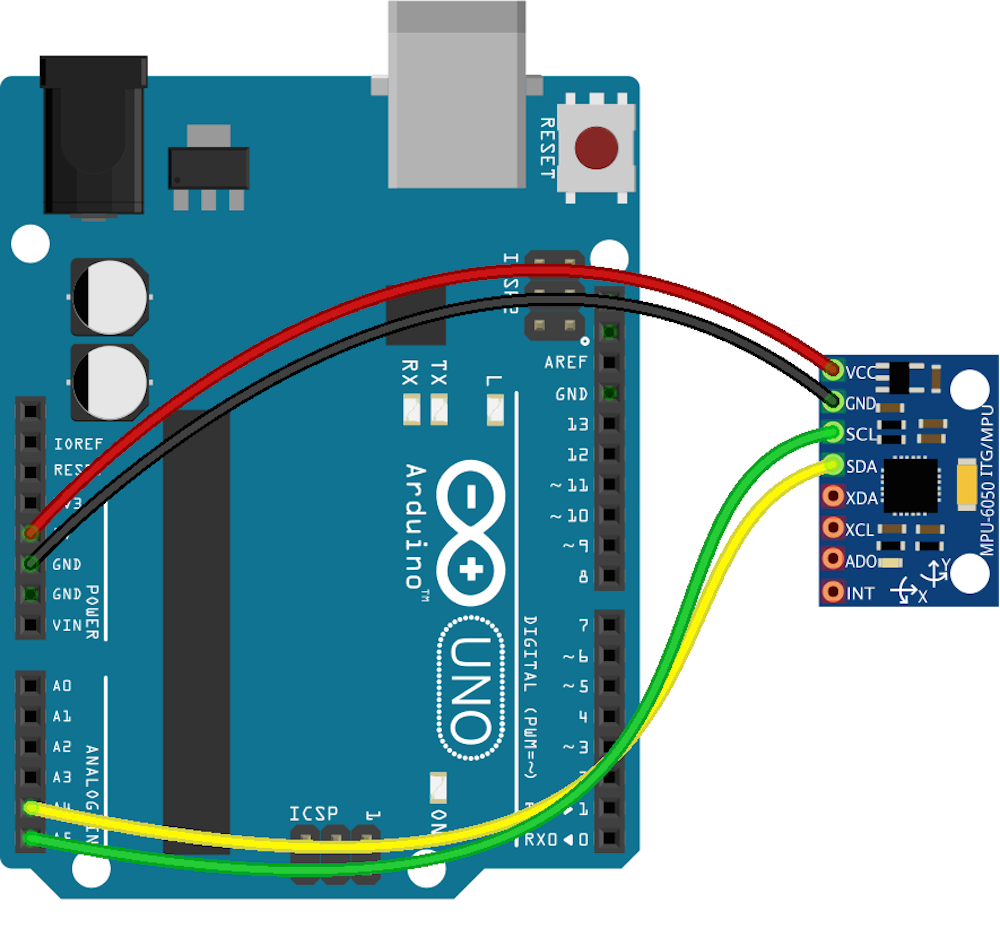
- MPU6050 (I2C)
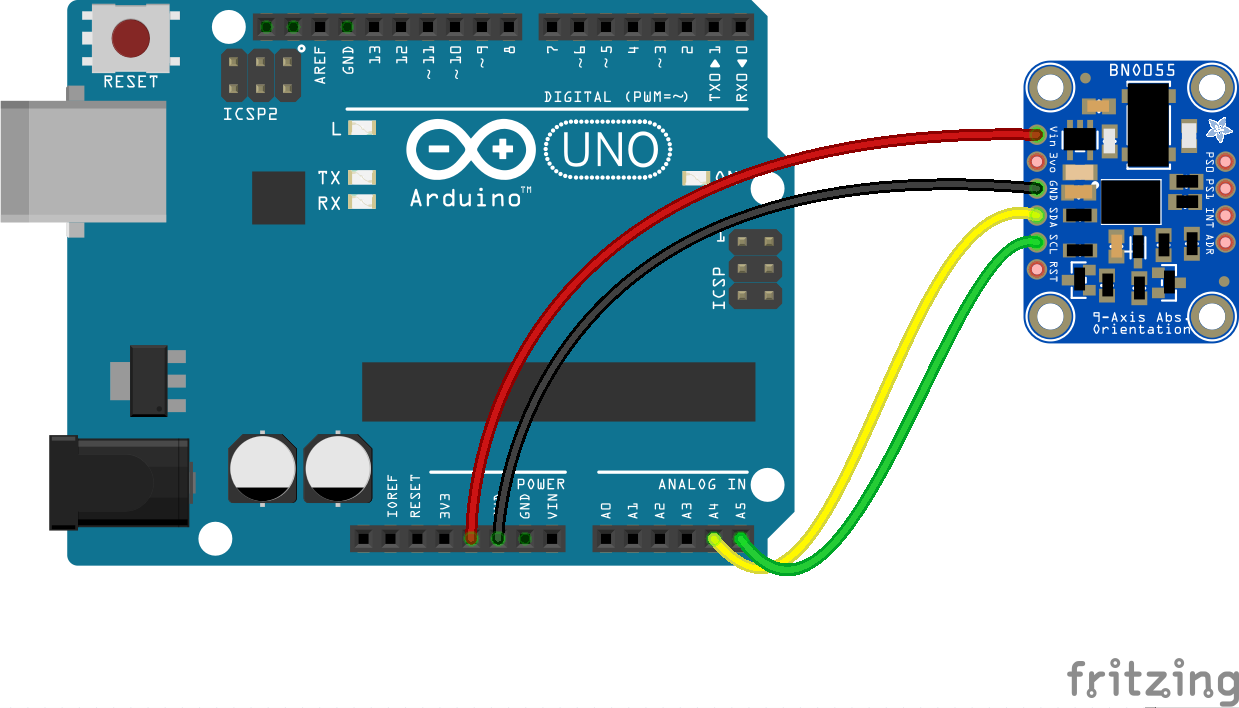
- BNO055
This list will continue to be updated as more Gyro devices are confirmed.
-
General Options
Property Type Value/Description Default Required controller string "ANALOG", "MPU6050". The Name of the controller to use "ANALOG" no -
Analog Options (
controller: "ANALOG")Property Type Value/Description Default Required pins Array of Strings ["A*"]. The String analog pins that X, Y, and Z (optional) are attached toyes sensitivity Number Varies by device. For Tinkerkit, use Gyro.TK_4XorGyro.TK_1X. This value can be identified in the device's datasheet.yes resolution Number Varies by device. This value can be identified in the device's datasheet 4.88 no -
MPU6050 Options (
controller: "MPU6050")Property Type Value/Description Default Required sensitivity Number LSB/DegreesPerSecond. The sensitivity of the device. The MPU-6050 is currently configured at +/- 250 degrees per second 131 no
| Property Name | Description | Read Only |
|---|---|---|
id |
A user definable id value. Defaults to a generated uid | No |
pins |
The pins defined for X, Y, and Z. | No |
isCalibrated |
The calibration state of the device. | Yes |
pitch |
An object containing values for the pitch rate and angle. | Yes |
roll |
An object containing values for the roll rate and angle. | Yes |
yaw |
An object containing values for the yaw rate and angle. | Yes |
rate |
And object containing the rate values of X, Y, and Z. | Yes |
x |
Value of x axis. | Yes |
y |
Value of y axis. | Yes |
z |
Value of z axis. | Yes |
// Analog Gyro:
//
// - attach X and Y to "A0" and "A1" respectively
// - Use the LPR5150AL 4X sensitivity rating
//
new five.Gyro({
pins: ["A0", "A1"],
sensitivity: 0.67, // optional
resolution: 4.88 // optional
});
// Create an MPU-6050 Gyro object:
//
// - attach SDA and SCL to the I2C pins on your board (A4 and A5 for the Uno)
// - specify the MPU6050 controller
new five.Gyro({
controller: "MPU6050",
sensitivity: 131 // optional
});
// Create an BNO055 Gyro object:
//
// - attach SDA and SCL to the I2C pins on your board (A4 and A5 for the Uno)
// - specify the BNO055 controller
new five.Gyro({
controller: "BNO055"
});
var five = require("johnny-five");
var board = new five.Board();
board.on("ready", function() {
var gyro = new five.Gyro({
controller: "MPU6050"
});
gyro.on("change", function() {
console.log("gyro");
console.log(" x : ", this.x);
console.log(" y : ", this.y);
console.log(" z : ", this.z);
console.log(" pitch : ", this.pitch);
console.log(" roll : ", this.roll);
console.log(" yaw : ", this.yaw);
console.log(" rate : ", this.rate);
console.log(" isCalibrated : ", this.isCalibrated);
console.log("--------------------------------------");
});
});- recalibrate() Tell the device to recalibrate
-
change The "change" event is emitted whenever the value of the gyro changes more then the threshold value allows.
-
data The "data" event is fired as frequently as the user defined
freqwill allow in milliseconds. ("data" replaced the "read" event)