LCR Follow Task Guide - directedmachines/customer-support GitHub Wiki
WARNING: This document is out of date and is kept here for reference only.
Table of Contents
- Overview
- Prerequisites
- Loading the Follow Page
- User Interface
- Follow
- Work Area Settings
- Work Area Edit Step by Step
- Work or Exclusion Area Copy and Paste
- Next Steps
Overview
The follow user interface configures and enables the autonomous follow function of the robot.
Video Examples
Examples of follow UI and robot behavior while in follow mode
Prerequisites
- First Use Guide
- Manual Control Guide
- A device (phone, tablet, PC) connected to the LCR WiFi
- The device locked in portrait mode (to prevent page refreshes when it is tilted)
- A web browser open with the LCR dashboard page loaded
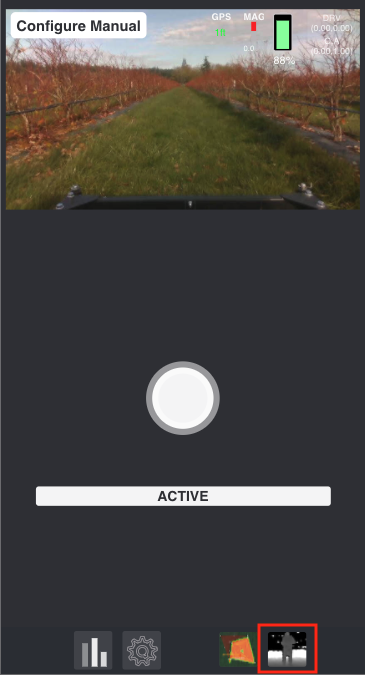
Loading the Follow Page
Tap/click the "follow" icon at the bottom right corner of the manual control screen
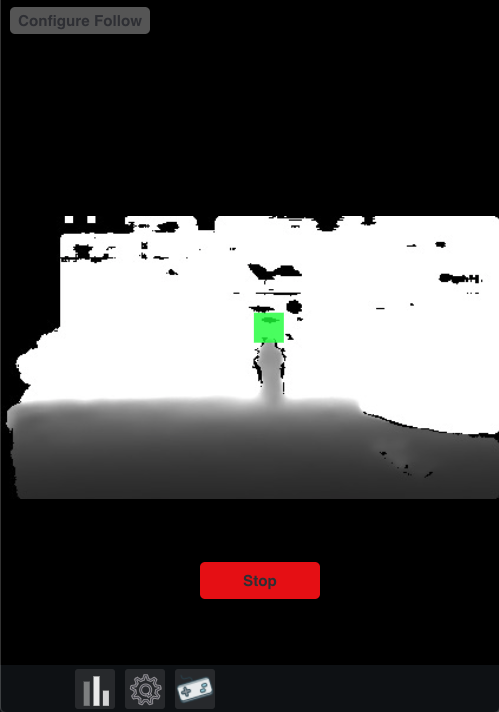
User Interface
The follow user interface has two primary functions:
- Configure the robot follow algorithm
- Start / Stop autonomous follow

Follow
The follow algorithm uses a combination of depth data and visual data (if the person is wearing a special tag) to locate the object it needs to follow. It takes into consideration obstacle avoidance and while following it will slow down (but not turn!) to avoid an obstacle closer than the object being followed
- Please use follow in open spaces
- Default distance where the robot will stop from the object being followed is **6ft / 2m **. If the object/person is further than that, the robot will move towards it.
- If the person is closer than 6ft / 2m from the leading edge of the robot, follow will stop
- If the person is outside the field of view of the active camera (about 40 degrees from center, either side), follow will stop
- Follow default settings allow the robot to safely follow a human walking at normal walking pace, about 3mph or 5Km/h
- Maximum distance for reliable follow is approximately 18ft / 6m
To enable follow, Tap/click the "Start" button.