LCR Autonomous Ground Task Example Case: GPS Denied Forest Trail - directedmachines/customer-support GitHub Wiki
Table of Contents
Overview
This guide goes over establishing a plan in tough, GPS denied, brush/forest roads, using Demeter in North Carolina as our example.
When in a structured row the robot can use obstacle avoidance to center left to right (short axis of row) and only loosely rely on GPS to determine where it is along the row. To enable this mode, the min spatial accuracy setting must be set on the path. When the robot is navigating, the UI will show the robot arrow in blue, meaning GPS is not used for precise positioning. This ability to ignore GPS helps immensely in areas with poor GPS (heavy canopy, under solar panels) since the structure guides the robot path.
GPS can be wrong as much as a row width on the orthogonal to row axis.
GPS is still used to determine where we are along the axis. If GPS is not available at all, robot navigation will pause
On row exit / entry GPS accuracy of at least half the row width is required, for the robot to enter the correct row
To enable visual localization mode, draw a parameter domain over the paths you want it to include, then set its minSpatialAccuracyMM parameter to a value less than 400mm (its a dilution of precision value unlikely to be achieved by GPS).
When the visual + compass localization is used, the robot arrow icon will change color to blue with a "fuzzy" green border.
Approach
The area in question that needed to be traversed was a 300+m forest trail surrounded by tall trees that had poor GPS signal. We drove the LCR down the trail to get a heatmap to place waypoints on. Then set up a parameter domain over the path to tune the obstacle avoidance parameters.
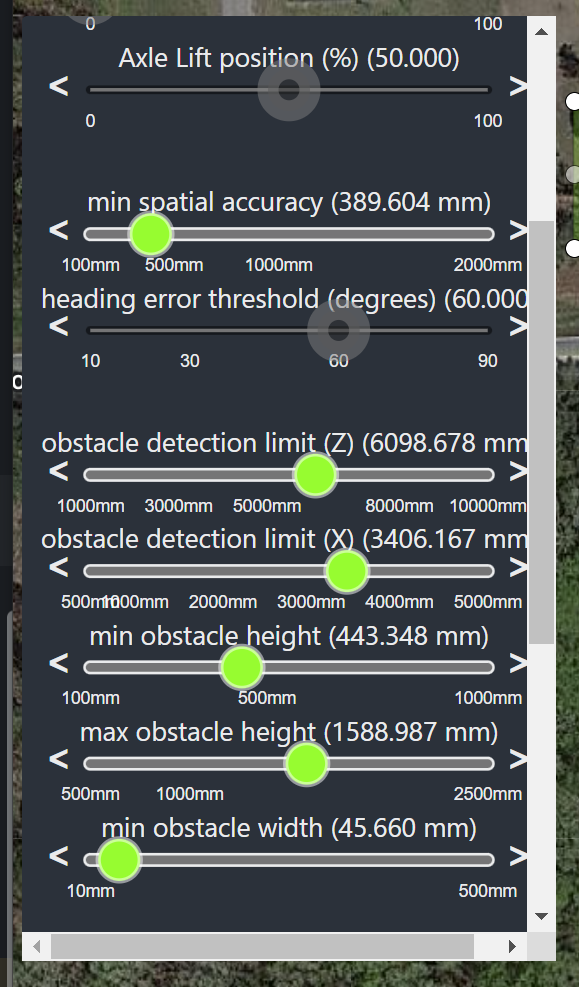
As shown above, the following parameters were used in the Parameter Domain
- min spatial accuracy ~400 mm
- obstacle detection limit (Z) ~6000 mm - (LCR looks 20 feet ahead to try to maintain its awareness of the path edges)
- obstacle detection limit (X) ~3400 mm - (LCR looks 11 feet left and right to try to maintain its awareness of the path edges)
- min obstacle height ~440 mm - (LCR ignores obstacles below 1.5 ft)
- max obstacle height ~1600 mm - (LCR ignores obstacles above 5.25 ft)
- min obstacle width ~45 mm - (LCR ignores obstacles narrower than 4.5 cm)

GPS is disabled, so we use POMDP esitmation mode with Obstacle Avoidance on. For more on POMDP (Partially Observable Markov Decision Process), see the "Topological Probabilistic Navigation" section at https://directedmachines.com/technology.html
Video of result: https://photos.app.goo.gl/HzuFAuAMMuyBHXhc7