Nano V3 Ethernet Shield W5500_RU - dimaatmelodromru/techdoc GitHub Wiki
Nano V3 Ethernet Shield W5500 with PoE — Overview

Плата Nano V3 Ethernet Shield W5500 предназначена для работы в паре с контроллером RobotDyn Nano V3 и позволяет добавлять в ваши проекты поддержку работы с Ethernet сетью. Особенностью данного решения являются миниатюрные размеры и возможность легко добавить сетевую поддержу в ваш проект на RobotDyn Nano V3 — для этого достаточно просто соединить вместе «бутербродом» плату контроллера и сетевого шилда — и ваш сервер готов! Останется только загрузить соответствующую прошивку и вы сможете управлять и обмениваться данными как с вашим сервером, так и с компьютерами в локальной сети и интернете.

Быстрый сетевой чип WIZnet W5500 с поддержкой работы одновременно с 8-ю сокетами и аппаратной реализацией сетевого стека позволяет создавать мощные и надёжные сетевые приложения: различные сервера, сетевые клиенты и т. п., а также позволяет работать с большинством современных актуальных сетевых протоколов.
| Параметр | Значение |
|---|---|
| Microcontroller | WIZnet W5500 |
| PHY compliance | 10BaseT/100BaseTX Ethernet. Full and half duplex |
| Operating Voltage | 3.3 V |
| Memory | 32 Kbytes memory for TX/RX buffers |
| TCP/IP Protocols | TCP, UDP, ICMP, IPv4, ARP, IGMP, PPPoE |
| PHY Clock Speed | 25 MHz |
Для тех случаев, когда подведение питания к вашему контроллеру затруднено или невозможно, плата Nano V3 Ethernet Shield W5500 поддерживает сетевое питание по стандарту PoE. Поддержка осуществляется при помощи небольшого адаптера, подключаемого к специальному разъёму сбоку платы Ethernet Shield.
В продаже есть платы Nano V3 Ethernet Shield W5500 как с PoE модулем, так и без него — вы можете выбрать тот вариант, который лучше подходит для реализации вашего проекта.

На плате Nano V3 Ethernet Shield W5500 установлен мощный стабилизатор питания 3,3 В, рассчитанный на нагрузку до 0,8 А, что позволяет свободно питать как саму микросхему сетевого интерфейса WIZnet W5500, так и дополнительно подключаемые модули. Качественное питание — это залог стабильной и беспроблемной работы ваших сетевых проектов на шилде Nano V3 Ethernet Shield W5500.
Программирование Nano V3 Ethernet Shield W5500 не вызывает никаких проблем и осуществляется в обычном Arduino-стиле: к проекту подключается Ethernet библиотека и вы пишите свой код или модифицируете код из примеров, идущих в комплекте с этой библиотекой. Или вы можете воспользоваться свободным кодом одного из множества Open Source проектов Arduino.
С этой платой может быть использована библиотека Ethernet2 или её более продвинутый аналог Ethernet3 с большим количеством функций и более широким набором возможностей.
5 причин почему вам стоит обратить внимание на плату Nano V3 Ethernet Shield W5500 и использовать её в своих проектах:
1 Уникальный дизайн Это оригинальная разработка компании RobotDyn, не имеющая аналогов как по своей концепции, так и по своим техническим возможностям
2 Миниатюрные размеры Ethernet Shield специально разработан для работы с миниатюрной платой RobotDyn Nano V3 и позволяет одним движением собрать быстрый и функциональный сервер для ваших проектов.
3 Мощный чип W5500 Шилд основан на мощной и производительной микросхеме сетевого интерфейса WIZnet W5500, имеющей 8 сокетов и аппаратно реализующей сетевой стек.
4 Поддержка PoE Эта плата при помощи специального адаптера поддерживает стандарт PoE для получения питания по сетевому кабелю и позволяет создавать проекты без использования блоков питания и аккумуляторов.
5 Профессиональное решение Инженеры компании RobotDyn создали эту плату для продвинутых любителей DIY и профессиональных разработчиков — она поддерживает уникальные настройки, например, позволяет управлять перезагрузкой чипа W5500 и использовать его прерывания (IRQ).
Для начала работы с Nano V3 Ethernet Shield W5500 вам понадобится всего несколько вещей:
1 Сама плата Nano V3 Ethernet Shield W5500
2 Плата контроллера RobotDyn Nano V3
3 Micro USB кабель для соединения с компьютером
4 Сетевой Ethernet кабель для подключения к вашей локальной сети
Порядок действий следующий: вы соединяете «бутербродом» платы Nano V3 Ethernet Shield W5500 и RobotDyn Nano V3, подключаете сетевой Ethernet кабель к шилду и USB кабель к соответствующему разъёму на микроконтроллере. Это всё, теперь вы можете программировать систему и работать с вашим новым сетевым проектом.
Nano V3 Ethernet Shield W5500 with PoE — Connection
Плата Nano V3 Ethernet Shield W5500 подключается к контроллеру RobotDyn Nano V3 простым соединением «бутербродом», поэтому распиновка у обеих плат совпадает. Основное количество GPIO контактов контроллера Nano «транзитом» проходит сквозь шилд, никак им не используется и остаётся доступным для подключения различной периферии в виде датчиков, актуаторов и т. п. оборудования.

Предупреждение. Обратите внимание на цоколёвку и правильность соединения шилда и платы микроконтроллера, иначе плата и шилд могут выйти из строя.
Некоторые контакты используются совместно обеими платами шилда и контроллера, далее об их назначении будет рассказано более подробно.

На схеме ниже представлена распиновка платы Nano V3 Ethernet Shield W5500. Отдельно обозначены контакты для подключения опционального PoE модуля. На этой схеме промаркированы все контакты, которые используются для взаимодействия плат Nano V3 Ethernet Shield W5500 и Nano V3. Те контакты, которые не промаркированы специальным образом, остаются свободными для подключения и использования вами в качестве GPIO в ваших проектах.

Интерфейс SPI используется для связи контроллера и шилда, обмена между ними информацией и для управления работой сетевого шилда микроконтроллером. Контакты D10, D11, D12, D13 используются шилдом и их нельзя использовать в качестве GPIO для каких-либо иных нужд.
D10/CS — контакт выбора устройства на шине интерфейса SPI
D11/MOSI — контакт MOSI интерфейса SPI
D12/MISO — контакт MISO интерфейса SPI
D13/SCK — контакт SCK интерфейса SPI
Для продвинутых пользователей и профессионалов, которым нужно больше контроля над оборудованием, инженерами компании RobotDyn на плате шилда предусмотрены перемычки для соединения их пайкой. Замыкая и размыкая эти контакты, вы можете управлять работой дополнительных функций сетевого контроллера.

Перемычка RST – D7
Инициализация чипа WIZnet W5500. Состояние по умолчанию: замкнуто. Чип W5500 инициализируется подключением высокого уровня на пин RST. Если пользователь хочет управлять включением/выключением Ethernet (например, понизить потребление питания системы или отключить сеть на аппаратном уровне), то он может удалить перемычку D7 и самостоятельно управлять чипом W5500.
В этом случае в код скетча нужно добавить строки инициализации RST пина и выставить на нём высокий потенциал:
#define RST 7 // W5500 RST
// If you want to control Reset function of W5500 Ethernet controller
pinMode(RST, OUTPUT);
digitalWrite(RST, HIGH);Если установить низкий потенциал на RST пине, то это приведёт к остановке работы чипа W5500 и, соответственно, отключению Ethernet вашего устройства.
digitalWrite(RST, LOW);Перемычка INT – D8
Получение сигнала прерывания от чипа W5500. Состояние по умолчанию: разомкнуто. Замкнув эту перемычку, вы получаете возможность использовать сигнал прерывания от чипа W5500. Если на этом пине высокий уровень, значит чип W5500 в этот момент получает данные по Ethernet. Эта возможность может использоваться в продвинутых сценариях работы контроллера с сетью.
На плате Nano V3 Ethernet Shield W5500 имеются также две специальные гребёнки контактов для подключения дополнительного PoE модуля.

Вам достаточно подсоединить PoE модуль к плате Nano V3 Ethernet Shield W5500 и вы сможете отключить вашу систему от сетевого адаптера — питание будет поступать через Ethernet кабель (для этого сам Ethernet кабель должен быть подключён к оборудованию, поддерживающему стандарт PoE).
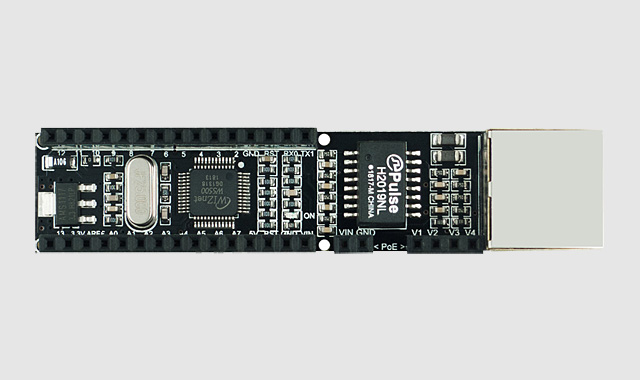
На рисунке ниже представлен вид PoE модуля, предназначенного для подключения к шилду Nano V3 Ethernet Shield W5500.

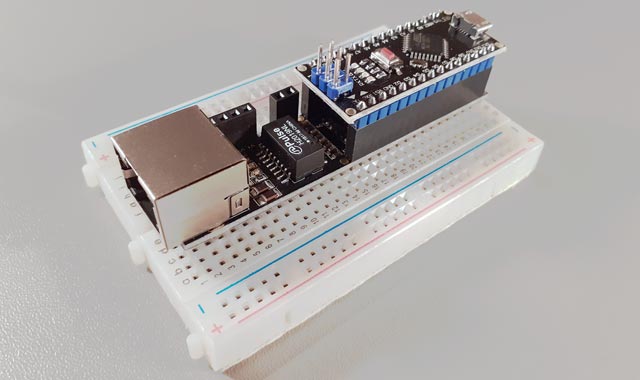
Вид обеих плат Nano V3 Ethernet Shield W5500 и PoE модуля в сборе:

V1 — контакт PoE питания 1
V2 — контакт PoE питания 2
V3 — контакт PoE питания 3
V4 — контакт PoE питания 4
VIN — контакт выходного напряжения PoE модуля
GND — земля
| Величина | Значение |
|---|---|
| Input Voltage (Vin) | 7~12V |
| PoE Type | No PoE/Active PoE/Passive PoE |
| Power IN (PoE) | Optional module, 48V (input), 9V (output) |
| Ethernet socket | RJ45 |
| PCB Size | 17.8x77.0 mm |
| Weight | 15g/25g (with PoE module) |
| Величина | Значение |
|---|---|
| Ethernet Power (IN) | 12~48V DC |
| Output | DC 9V |
| Величина | Значение |
|---|---|
| Ethernet Power (IN) | 12~48V DC |
| Output | DC 12V |
Плата Nano V3 Ethernet Shield W5500 имеет небольшие габаритные размеры 17,8x77 мм и небольшой вес: 15 грамм без PoE модуля и 25 грамм в сборе с PoE модулем.

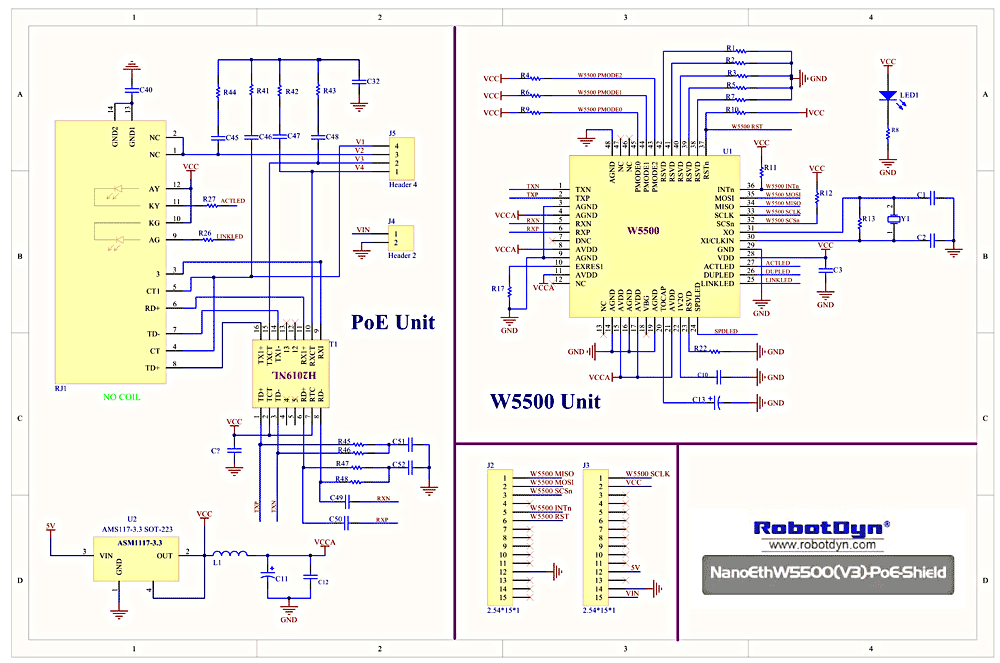
На рисунке ниже представлена принципиальная электрическая схема платы Nano V3 Ethernet Shield W5500 и подключаемого к ней PoE модуля. Вы можете использовать эту схему для уточнения деталей и лучшего понимания работы шилда Nano V3 Ethernet Shield W5500.
Базовый пример веб-сервера на Nano V3 Ethernet Shield W5500
В этой статье мы разберём создание и работу простого веб-сервера на шилде Nano V3 Ethernet Shield W5500. Этот пример позволит вам понять принцип работы веб-серверов на микроконтроллерах и познакомиться со схемотехникой и новыми платами компании RobotDyn.
В этом эксперименте нам понадобится следующее оборудование:
- Плата Nano V3 Ethernet Shield W5500
- Микроконтроллер RobotDyn Nano V3 (или совместимый)
- Макетная плата (опционально)
- Micro USB кабель
- Ethernet кабель
Сборка стенда очень простая: достаточно соединить вместе «бутербродом» платы Nano V3 Ethernet Shield W5500 и RobotDyn Nano V3. Опционально, эту сборку можно установить на макетную плату — это придаст устойчивости всей конструкции и позволит в дальнейшем легко подключать различную периферию для проведения экспериментов.
Предупреждение: обратите внимание на цоколёвку и правильность соединения шилда и платы микроконтроллера, иначе плата и шилд могут выйти из строя.
Для завершения сборки стенда его нужно подключить к вашему компьютеру и локальной сети.
Подключение к компьютеру осуществляется при помощи кабеля c Micro USB разъёмом. Стандартного тока USB порта в 500 мА вполне хватает для питания всей конструкции, поэтому дополнительное питание не требуется.
Ethernet кабелем вы можете подключить ваш будущий сервер к соответствующей розетке в вашем помещении или напрямую к роутеру или коммутатору, в зависимости от конфигурации вашей локальной сети.
Без сетевого шилда ваш микроконтроллер лишён возможности взаимодействия с внешним миром, он может только локально управлять некоторым оборудованием. Добавление сетевой платы к вашему проекту открывает широкие возможности: ваш контроллер сможет обмениваться данными с другими микроконтроллерами, посылать данные в интернет, получать различные управляющие команды по сети и т. д.
Кроме этого, при помощи сетевой платы вы сможете создать интерактивный веб-интерфейс для своего устройства и управлять им так же легко, как вы делаете это с обычными сайтами.
На этом уроке мы создадим простой веб-сервер и подробно разберём как он работает. Взаимодействие будет проходить следующим образом: в адресной строке браузера вы вводите IP адрес вашего Arduino-сервера, нажимаете Enter и на веб-странице видите ответ вашего сервера.
В качестве ответа Arduino-сервера можно вывести различную информацию, в нашем примере мы будем выводить надпись «Analog port 0 is» и далее текущее значение нулевого аналогового порта контроллера (A0). Надпись будет выглядеть примерно так:
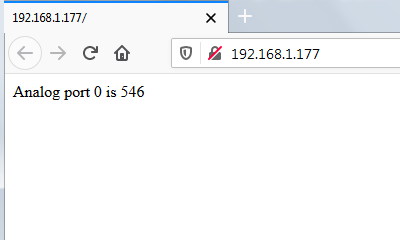
Несмотря на то, что это только одна строка, но поняв принцип её вывода, вы в дальнейшем сможете создавать любые, сколь угодно сложные веб-страницы и даже целые веб-сайты.
Итак, тестовый стенд мы собрали, подключили его к компьютеру и локальной сети, теперь настало время заняться созданием скетча веб-сервера. Сначала приведём полный текст скетча, а затем подробно разберём его работу.
/*
Web Server example
(based on standard example by David A. Mellis & Tom Igoe)
(c)2019 RobotDyn
License: GNU GPL 2.1
A simple web server that shows the value of the analog input pin.
Circuit:
* [Nano V3 Ethernet Shield W5500](https://robotdyn.com/nano-v3-ethernet-shield-w5500-v2.html) (use D10, D11, D12, D13 pins)
* [RobotDyn Nano V3](https://robotdyn.com/nano-v3-atmega-328-usb-ttl-ch340g-micro-usb.html)
* Analog input attached to pin A0
*/
// SPI library
#include <SPI.h>
// Ethernet2 library (support WIZnet W5500 chip)
#include <Ethernet2.h>
// MAC address
byte mac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED};
// IP address
IPAddress ip(192, 168, 1, 177);
// Ethernet server on 80 port (default for HTTP)
EthernetServer server(80);
const byte analogPort = 0;
// Setup
void setup() {
// Initialize Serial port
Serial.begin(115200);
// Print start message
Serial.println("Start WEB Server example...");
// Start Ethernet connection
Ethernet.begin(mac, ip);
// Start HTTP server
server.begin();
// Print IP address
Serial.print("Server at: ");
Serial.println(Ethernet.localIP());
} // setup()
// Functions
void responseHeader(EthernetClient cl) {
// send a standard http response header
cl.println("HTTP/1.1 200 OK");
cl.println("Content-Type: text/html");
cl.println("Connection: close"); // connection close after response
cl.println();
}
void sendPage(EthernetClient cl) {
// Get value of analog input pin
int value = analogRead(analogPort);
// Send Web-page
cl.println("<!DOCTYPE HTML>");
cl.println("<html>");
cl.print("Analog port ");
cl.print(analogPort);
cl.print(" is ");
cl.println(value);
cl.println("</html>");
}
// Server Works
void serverWorks() {
// listen for incoming clients
EthernetClient client = server.available();
if (client) {
Serial.println();
Serial.println("New client");
// an http request ends with a blank line
boolean currentLineIsBlank = true;
while (client.connected()) {
if (client.available()) {
// read character from client
char c = client.read();
// and print to Serial
Serial.write(c);
// if you've gotten to the end of the line (received a newline character)
// and the line is blank,
// the http request has ended, so you can send a reply
if (c == '\n' && currentLineIsBlank) {
// Response (send Web-page)
responseHeader(client);
sendPage(client);
break;
}
if(c == '\n') {currentLineIsBlank = true;}// starting a new line
else if (c != '\r') {currentLineIsBlank = false;} // gotten a character on the current line
} // client.available()
} // client.connected()
delay(1); // give browser time to receive data
client.stop(); // close connection
Serial.println("Client disconnected");
} // if (client)
} // serverWorks()
// Loop
void loop() {
serverWorks();
}Несмотря на то, что на первый взгляд скетч кажется большим и сложным, но, после нашего разбора его работы, он станет для вас простым и понятным.
В этом мини-проекте мы будем использовать среду разработки Arduino IDE версии 1.8.5, как стабильную и хорошо себя зарекомендовавшую. Экосистема Arduino постоянно развивается и часто выходят новые версии — вы можете использовать и более поздние версии среды Arduino.
Обратите внимание: в этой статье предполагается, что вы достаточно опытный пользователь Arduino, знакомы с основными принципами и приёмами работы с микроконтроллерами и средой Arduino IDE. Если вы испытываете какие-либо проблемы с пониманием этой статьи, то обратитесь к документации и примерам на сайте разработчика системы Arduino.
Для большинства Arduino-проектов требуется подключение сторонних библиотек. Библиотеки — это определённым образом оформленные сборники функций, ориентированные на решение тех или иных задач. Для вас, как пользователей этих библиотек, важно знать только как подключать библиотеки в скетче и уметь пользоваться их функциями (которые обычно описаны в соответствующей документации).
В нашем случае нам понадобится подключить две библиотеки: SPI и Ethernet2.
// SPI library
#include <SPI.h>
// Ethernet2 library (support WIZnet W5500 chip)
#include <Ethernet2.h>Библиотека SPI присутствует в стандартной поставке Arduino IDE, поэтому вам достаточно только подключить её в скетче одной строкой.
#include <SPI.h>Библиотеку Ethernet2 можно скачать с сайта GitHab по этой ссылке и установить стандартным образом. Описание процедуры установки библиотек в Arduino IDE выходит за рамки этой статьи, если вы с ней незнакомы, то о ней можно прочитать на сайте разработчика Arduino.
После установки библиотеки Ethernet2, её можно подключить в скетче одной строкой.
#include <Ethernet2.h>На этом предварительные действия закончены, мы можем приступать к созданию самого скетча веб-сервера.
Каждое сетевое устройство должно иметь уникальный 6-байтовый идентификатор, именуемый MAC (Media Access Control) адресом. Когда вы покупаете сетевое оборудование этот идентификатор уже содержится в каждом устройстве. В нашем случае мы можем задать этот адрес в скетче.
Какие конкретно значения байтов нужно выбирать для MAC адреса? Хорошей идеей будет воспользоваться адресом уже заданным в скетче примера. В случае, если у вас в сети находятся несколько Arduino-устройств — можно изменить в этом адресе последний байт для обеспечения его уникальности для каждого сетевого устройства.
// MAC address
byte mac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED};Если у вас в сети несколько Arduino-устройств — меняем последний байт MAC-адреса произвольным образом, например, вместо значения 0xED вводим значение 0xEE.
// MAC address
byte mac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xEE};Если MAC-адрес идентифицирует сетевое устройство на «железном» уровне, то для работы на программном уровне сетевого TCP/IP стека требуется ещё один 4-байтовый идентификатор, называемый IP (Internet Protocol) адресом.
Есть определённые правила задания таких адресов и специально оговоренные их диапазоны, но в нашем случае вам достаточно знать, что из всего IP-адреса
// IP address
IPAddress ip(192, 168, 1, 177);для нас является важным только последний байт 177. Это и есть «локальный адрес» который вы можете изменять в диапазоне от 1 до 254 по своему желанию. Тут важно только помнить, что как MAC-адреса, так и IP-адреса должны быть уникальными, то есть не повторяться у разных устройств в одной сети.
Примечание: если в настройках вашей локальной сети первые три байта отличаются от указанных в скетче, то вам нужно соответствующим образом изменить эти байты и в скетче.
Создаём объект веб-сервера (server) на 80-м порту, стандартном для HTTP протокола. Благодаря тому, что вся сложность реализации веб-сервера скрыта в библиотеке Ethernet, мы можем одной строкой создать такой сервер.
// Ethernet server on 80 port (default for HTTP)
EthernetServer server(80);По условию задачи, мы будем выводить на веб-страницу значение аналогового порта A0 контроллера Arduino. Для этого создаём константу analogPort и присвоим ей значение 0 (порт A0).
const byte analogPort = 0;В дальнейшем мы будем использовать эту константу для указания функции analogRead() из какого порта нужно брать текущее значение напряжения. В случае, если вы захотите выводить на страницу данные из другого порта, например, A1, то вам нужно будет просто изменить 0 на 1, например, так:
const byte analogPort = 1;Теперь перейдём непосредственно к написанию кода и функций скетча. В Arduino существуют две функции, которые обязательно должны присутствовать в каждом скетче setup() и loop().
Функция setup() выполняется один раз при старте системы и предназначена для проведения каких-то настроек, которые нужно произвести только один раз в начале работы.
Функция loop() – это бесконечный цикл, внутри которого располагается весь код скетча, который выполняет какие-то полезные действия.
Но этими двумя функциями программирование Arduino не ограничивается и мы можем создавать сколько угодно своих функций для решения наших задач. По этому принципу и построен скетч нашего веб-сервера — весь его функционал разбит на несколько функций, с работой и назначением которых мы познакомимся далее.
Разберём подробнее работу функции setup(). Сначала полный её код:
void setup() {
// Initialize Serial port
Serial.begin(115200);
// Print start message
Serial.println("Start example...");
// Start Ethernet connection
Ethernet.begin(mac, ip);
// Start HTTP server
server.begin();
// Print IP address
Serial.print("Server at: ");
Serial.println(Ethernet.localIP());
} // setup()Первая строка инициализирует Serial порт микроконтроллера на скорости 115200 бод. В некоторых скетчах вы можете видеть другие скорости работы порта, например 9600, но в нашем случае мы будем использовать более высокую скорость.
// Initialize Serial port
Serial.begin(115200);Примечание: если мы задали скорость работы последовательного интерфейса 115200, то такую же скорость нужно выставить и в настройках окна Serial Monitor.
И далее выводим в последовательный порт приветственную в надпись, сообщающую о старте нашего веб-сервера.
// Print start message
Serial.println("Start WEB Server example...");Затем инициализируем Ethernet с ранее заданными нами MAC и IP адресами и стартуем наш веб-сервер. С этого момента он начинает работу и будет отвечать на приходящие по сети запросы.
// Start Ethernet connection
Ethernet.begin(mac, ip);
// Start HTTP server
server.begin();И последнее, что мы делаем в функции setup() — это выводим в Serial информационное сообщение о том, на каком порту работает наш сервер, используя библиотечную функцию Ethernet.localIP().
// Print IP address
Serial.print("Server at: ");
Serial.println(Ethernet.localIP());Ниже представлен результат работы функции setup() и её вывод в Serial Monitor.

На этом работа функции setup() окончена, переходим к описанию и разбору работы функции loop().
Как вы помните, функция loop() — это бесконечный цикл и всё, что в нем находится, просто повторяется до тех пор, пока микроконтроллер не будет выключен.
void loop() {
serverWorks();
}В нашем случае loop() содержит только одну функцию serverWorks(), которая и реализуем весь функционал веб сервера. Можно было бы не использовать функцию serverWorks(), а весь её код поместить непосредственно в тело функции loop(), но так делать не стоит — это ухудшит структурированность и читаемость кода проекта.
Теперь, для общего понимания происходящих процессов, разберём что происходит, когда вы посылаете из браузера запрос веб серверу. В адресной строке браузера вы набираете IP-адрес Arduino-сервера:

В момент нажатия вами клавиши Enter браузер посылает запрос серверу по указанному IP-адресу. Этот запрос стандартизирован и отвечает заранее установленным требованиям. Выглядит этот запрос примерно так (детали могут отличаться в зависимости от вашего программного обеспечения).

Запрос содержит в себе много различной информации, но для нас в данном случае важны два момента, это:
GET /означающий, что браузер запрашивает главную «индексную» страницу сервера, и пустая строка после
Upgrade-Insecure-Requests: 1говорящая серверу, что запрос окончен и браузер начинает ожидание ответа от сервера. Вот, собственно, и вся магия GET запросов от браузера к серверу. Теперь переходим к рассмотрению работы функции serverWorks(), реализующий функционал нашего веб-сервера.
И вот, наконец, мы добрались непосредственно до кода самого веб-сервера. Этот код представляет собой стандартный пример из поставки библиотеки Ethernet2 и для наших целей даже необязателен для вашего понимания, вам достаточно знать, что он содержит вызовы двух наших функций responseHeader() и sendPage(), о которых мы поговорим чуть ниже.
void serverWorks() {
// listen for incoming clients
EthernetClient client = server.available();
if (client) {
Serial.println();
Serial.println("New client");
// an http request ends with a blank line
boolean currentLineIsBlank = true;
while (client.connected()) {
if (client.available()) {
// read character from client
char c = client.read();
// and print to Serial
Serial.write(c);
// if you've gotten to the end of the line (received a newline character)
// and the line is blank,
// the http request has ended, so you can send a reply
if (c == '\n' && currentLineIsBlank) {
// Response (send Web-page)
responseHeader(client);
sendPage(client);
break;
}
if(c == '\n') {currentLineIsBlank = true;}// starting a new line
else if (c != '\r') {currentLineIsBlank = false;} // gotten a character on the current line
} // client.available()
} // client.connected()
delay(1); // give browser time to receive data
client.stop(); // close connection
Serial.println("Client disconnected");
} // if (client)
} // serverWorks()Функция serverWorks() постоянно ожидает подключения клиента и, как только клиент подключится к серверу, анализирует его запрос и в ответ выдаёт веб-страницу. Выдача веб-страницы осуществляется функциями responseHeader() и sendPage().
Итак, весь процесс ответа сервера можно разбить на несколько шагов:
1 К серверу подключается клиент (браузер пользователя) 2 Браузер клиента посылает стандартизированный GET запрос 3 Функция serverWorks() принимает и анализирует GET запрос браузера 4 В случае корректности запроса, функция serverWorks() передаёт управление функциям responseHeader() и sendPage() 5 Функции responseHeader() и sendPage() формируют стандартный ответ и посылают веб-страницу браузеру 6 Пользователь видит в окне своего браузера присланную веб- страницу Arduino-сервера
Ниже представлен вывод функции serverWorks() в Serial Monitor среды разработки Arduino IDE при приёме GET запроса от браузера:

Функция отработала, послала веб-страницу и отключила клиента. Теперь наш веб-сервер готов для обслуживания следующего запроса.
По сути, это одна функция формирования ответа веб-сервера, разделённая на две для удобства понимания и лучшего структурирования кода. Ответ сервера на запрос состоит из двух частей:
1 Посылка заголовка с мета-информацией (функция responseHeader()) 2 Посылка собственно тела веб-страницы (функция sendPage())
Рассмотрим эти функции по-подробнее.
Функция responseHeader() занимается посылкой заголовка ответа с мета-информацией. Она формирует данные о протоколе и его версии, коде ответа и его результате, типе посылаемого контента и состоянии соединения — вся эта информация используется браузером для правильного отображения посылаемой ему веб-страницы.
void responseHeader(EthernetClient cl) {
// send a standard http response header
cl.println("HTTP/1.1 200 OK");
cl.println("Content-Type: text/html");
cl.println("Connection: close"); // connection close after response
cl.println();
}Как видно из представленного фрагмента кода сервера, посылка мета-информации заканчивается посылкой пустой строки.
Функция sendPage() это и есть «главный» фрагмент кода нашего сервера — именно в ней формируется та страница, которую мы потом видим в окне браузера. Поняв принцип формирования этой страницы, вы легко сможете создавать любые веб-страницы для ваших проектов.
void sendPage(EthernetClient cl) {
// Get value of analog input pin
int value = analogRead(analogPort);
// Send Web-page
cl.println("<!DOCTYPE HTML>");
cl.println("<html>");
cl.print("Analog port ");
cl.print(analogPort);
cl.print(" is ");
cl.println(value);
cl.println("</html>");
}Первая строка функции sendPage() получает текущее значение аналогового порта контроллера analogPort и присваивает его переменной value.
// Get value of analog input pin
int value = analogRead(analogPort);Далее идёт формирование отсылаемой веб-страницы с использованием стандартных HTML тегов.
cl.println("<!DOCTYPE HTML>");
cl.println("<html>");
cl.print("Analog port ");
cl.print(analogPort);
cl.print(" is ");
cl.println(value);
cl.println("</html>");И вот что вы видите как результат этих действий в окне своего браузера:
А вот как выглядит HTML код присланной сервером веб-страницы:

Вот, собственно, и весь принцип работы веб-сервера и формирования им веб-страниц на микроконтроллерах Arduino. Возможно сразу это покажется вам несколько сложным, но, внимательно прочитав это руководство и поэкспериментировав с вашей платой Nano V3 Ethernet Shield W5500, вы, несомненно, станете мастером сетевого взаимодействия контроллеров Arduino.
Вооружившись платой Nano V3 Ethernet Shield W5500 компании RobotDyn и информацией из этой статьи, вы сможете создавать свои интересные сетевые проекты или улучшать сторонние Open Source проекты — ведь теперь вы понимаете как работают веб-сервера на Arduino.
Загрузить скетч примера веб-сервера на Nano V3 Ethernet Shield W5500.
Скетч примера веб-сервера на Nano V3 Ethernet Shield W5500 Size: 3 KB
Overview Nano V3 Ethernet Shield W5500 Спецификации и подключение Nano V3 Ethernet Shield W5500 Купить Nano V3 Ethernet Shield W5500 Купить RobotDyn Nano V3