SLAM with TurtleBot3 - cyberbotics/webots_ros2 GitHub Wiki
Before proceeding, make sure you have the
webots_ros2package installed — Getting Started.
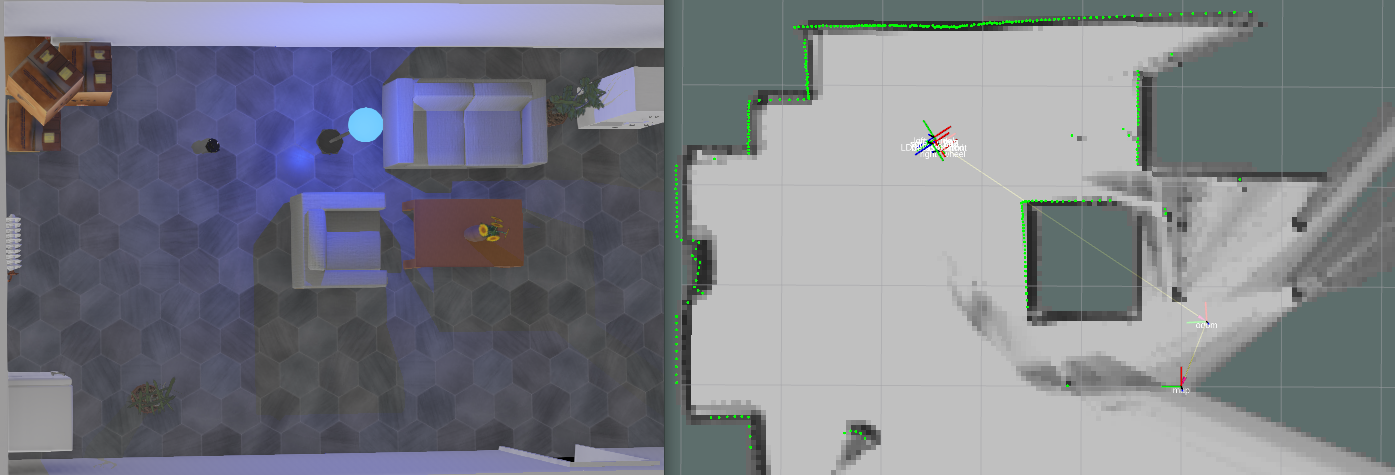
In this tutorial, we want to show you how to use SLAM with Webots simulated TurtleBot3 Burger. You will see that Webots uses a standard ROS2 interface that can be used with the TurtleBot3 SLAM package without modifications.
sudo apt install ros-${ROS_DISTRO}-turtlebot3-cartographeror compile the package from source
To compile the turtlebot3_navigation2 package do the following:
source /opt/ros/${ROS_DISTRO}/local_setup.bash
# Retrieve the sources
cd /path/to/ros2_ws
git clone -b ${ROS_DISTRO}-devel https://github.com/ROBOTIS-GIT/turtlebot3.git src/turtlebot3
# Check dependencies
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro ${ROS_DISTRO}
# Building packages
colcon build --packages-up-to turtlebot3_navigation2
source install/local_setup.bashOnce the turtlebot3_cartographer package is installed, you can launch the Webots simulation with SLAM tools:
ros2 launch webots_ros2_turtlebot robot_launch.py slam:=trueYou can move the robot around with:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
On the official TurtleBot3 website you can find more information about SLAM configuration.