Introduction - cheeseBG/EmergencyResponseSystem GitHub Wiki
As IT technology advances, the use of non-contact UI through hologram or image processing is attracting attention. As technology that detects dangerous situations by analyzing behavior with AI also emerged, we thought it would be good to create a emergency response system using a non-contact UI by reminding the minority report.
ERS (Emergency Response System) can monitor the situation and notify of dangerous situations through CCTV installed in the field. The notification allows the user to detect the danger and immediately dispatch the unmanned robot to the field via hand sign. For that, the command to be transmitted to the robot was implemented through coordinates. Even when dispatching, the user can secure the robot's field of view in real time through the ESP Cam mounted on the unmanned robot. When you get to the scene to some extent, you can capture scenes that require a little closer look to determine the situation. It is possible to redisplay the captured photos in high resolution through the SR (Super Resolution) solution so that photos captured in lower resolution can be viewed more clearly. It also provides the ability to check how many situations have been resolved once the situation has been resolved.
- Situation detection with CCTV

- Site confirmation by dispatching unmanned robots using hand sign

- Capturing situations you need to look closely at

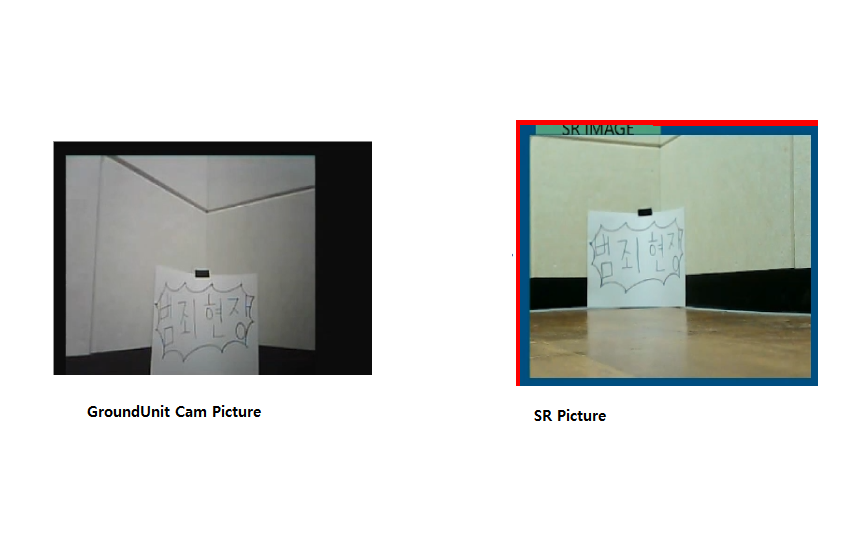
- SR function to show captured photos in high resolution

Difference between SR image and ground Unit cam image
- Check how many situations have been resolved