Reference Frames - bld/SolarSailNavigator GitHub Wiki
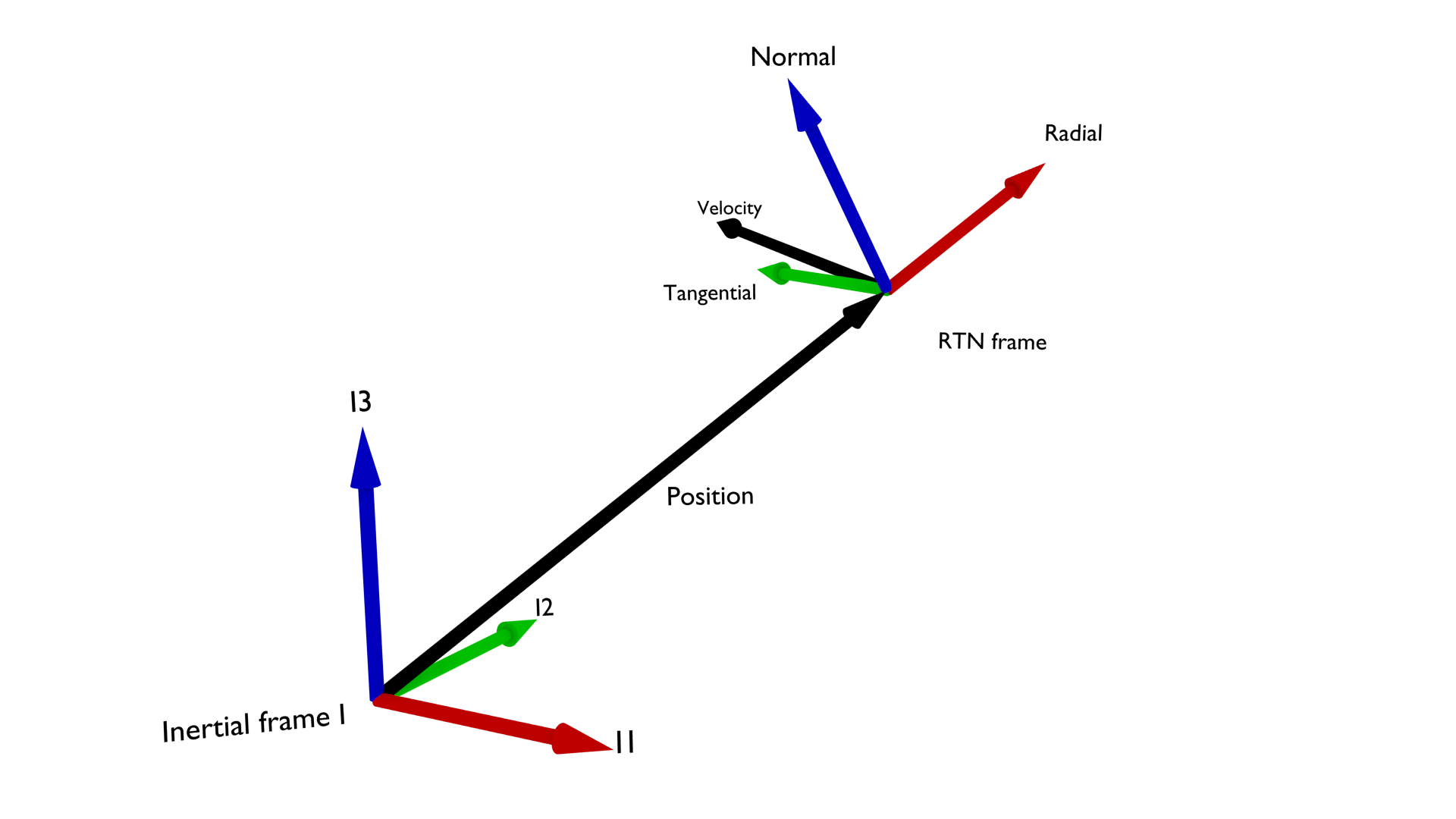
Formed from the position and velocity vectors as shown here. Note that the tangential vector is not necessarily in the same direction as the velocity.
The body frame of the sail is calculated from the RTN Frame by two rotations. The first is a rotation by the Clock angle around Radial vector.

The second rotation is the Cone angle, which is about the new Sail Z vector (which is the Orbit Normal rotated by the Clock angle).

The Sail Normal defines the direction that the sail points, and is the Radial vector rotated by both the Clock and Cone angles.

Realistic solar sails would have a 3rd rotation called Flatspin, which is about the sail normal, to account for asymmetric reflection of the sunlight when it strikes the sail from different directions due to variations in the shape.