ROSBAG Demo - autowarefoundation/autoware_ai_documentation GitHub Wiki
Demo data
This demo will need the given 3D map and ROSBAG sample data. Please download the following sample data before running the demo.
-
Download the sample 3D pointcloud/vector map data. [link]
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_data.tar.gz -
Download the sample data (LiDAR: VELODYNE HDL-32E, GNSS: JAVAD GPS RTK Delta 3) in ROSBAG format or ROSBAG2 format.
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.tar.gzMirroror
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.bag2.tar.gz
Want more data?
Once the demo goes well, you can visit ROSBAG STORE to get more data. Please also consider your contribution to this data sharing service by uploading your ROSBAG data.
Demo run
Assumptions
- Autoware built from source: the demo
dataandrosbaghave been downloaded into the Downloads folder. - Autoware run from docker image: the demo
dataandrosbaghave been downloaded into theshared_dirfolder within the host.
Steps
-
Create the
.autowaredirectory and extract the demo data inside.From source:
$ cd ~ $ mkdir .autoware $ cd .autoware $ cp ~/Downloads/sample_moriyama_* . $ tar zxfv sample_moriyama_150324.tar.gz $ tar zxfv sample_moriyama_data.tar.gzUsing Docker:
$ cd ~ $ mkdir .autoware $ cd .autoware $ cp ~/shared_dir/sample_moriyama_* . $ tar zxfv sample_moriyama_150324.tar.gz $ tar zxfv sample_moriyama_data.tar.gz -
Run Autoware
For Autoware version 1.12.0 and Newer
$ cd autoware.ai $ source install/setup.bash $ roslaunch runtime_manager runtime_manager.launchFor Autoware version 1.11.0 and 1.11.1
$ cd autoware/ros $ source install/setup.bash $ ./runFor Autoware version 1.10.0 or older
$ cd autoware/ros $ source devel/setup.bash $ ./run -
Go to the
Simulationtab of Autoware Runtime Manager (ARM), and load the sample ROSBAG data, which is located in~/.autoware.Show Hidden Filesneeds to be checked for the.autowarefolder to be displayed. -
Set the start time to
140, then clickPlayandPausejust after it has started playing. -
Launch RViz through the
RVizbutton in the bottom-right corner of the ARM and load thedefault.rvizconfig provided with Autoware. To do this got toFile -> Open Configand navigate toautoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz. -
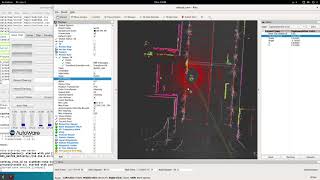
Go to the
Quick Starttab of ARM, and load the preinstalled roslaunch scripts one by one. The scripts are located inautoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/. The scripts need to be enabled by clicking on the left button as shown in the image for theMap. -
Un-pausing the simulation after starting the
Mapwill show the pointcloud map in Rviz.
Video steps
Please follow the instruction video below: