DRIVE PX2 Docker - autowarefoundation/autoware_ai_documentation GitHub Wiki
The version of Autoware provided via DRIVE PX2 Docker is 1.6.2 and not updated for a long time.
This page guides you to install and run Autoware on the NVIDIA DRIVE PX2 platform using Docker. Note that DRIVE PX2 requires you to be a licensee of NVIDIA DRIVE and DevZone. To complete the installation process introduced below, please contact Autoware Developers Group at [email protected]. For other platforms, such as Generic x86, please check here whether they are supported. The outline of this page is as follows:
- Docker Setup
- Autoware Setup
- DriveWorks Interface
Docker Setup
Docker Package Installation
You first need to setup the Docker environment. You may not access docker.io with the default configuration of Ubuntu 16.04, so try the following installation process.
$sudo apt-get install -y software-properties-common
$sudo apt-add-repository universe
$sudo apt-get update
$sudo apt-get install docker.io
$sudo apt-get update
Docker Package Test
Type the following commands.
$sudo docker info | grep "Docker Root Dir"
If you get the following output, you might continue with the process.
Docker Root Dir: /var/lib/docker
Autoware Setup
Requirements
- 15 GB of free space (7GB temporarily used)
- CUDA 9.0 installed
Docker Image Installation
-
Download install_autoware_drivepx2_docker.sh.
-
Change to the download directory, and execute the following commands in the terminal. Note that the script will modify
.bashrcto add Autoware to the path env variable. If you a different shell than bash, please add "/usr/local/autoware/bin" to${PATH}.$ sudo ./install_autoware_drivepx2_docker.sh $ source ~/.bashrc
How to Run
Execute
$ autoware-docker
This will launch an interactive bash inside the Docker container. To launch Autoware, run:
$ ~/start_autoware.sh
Autoware RTM should be displayed.
DriveWorks Interface
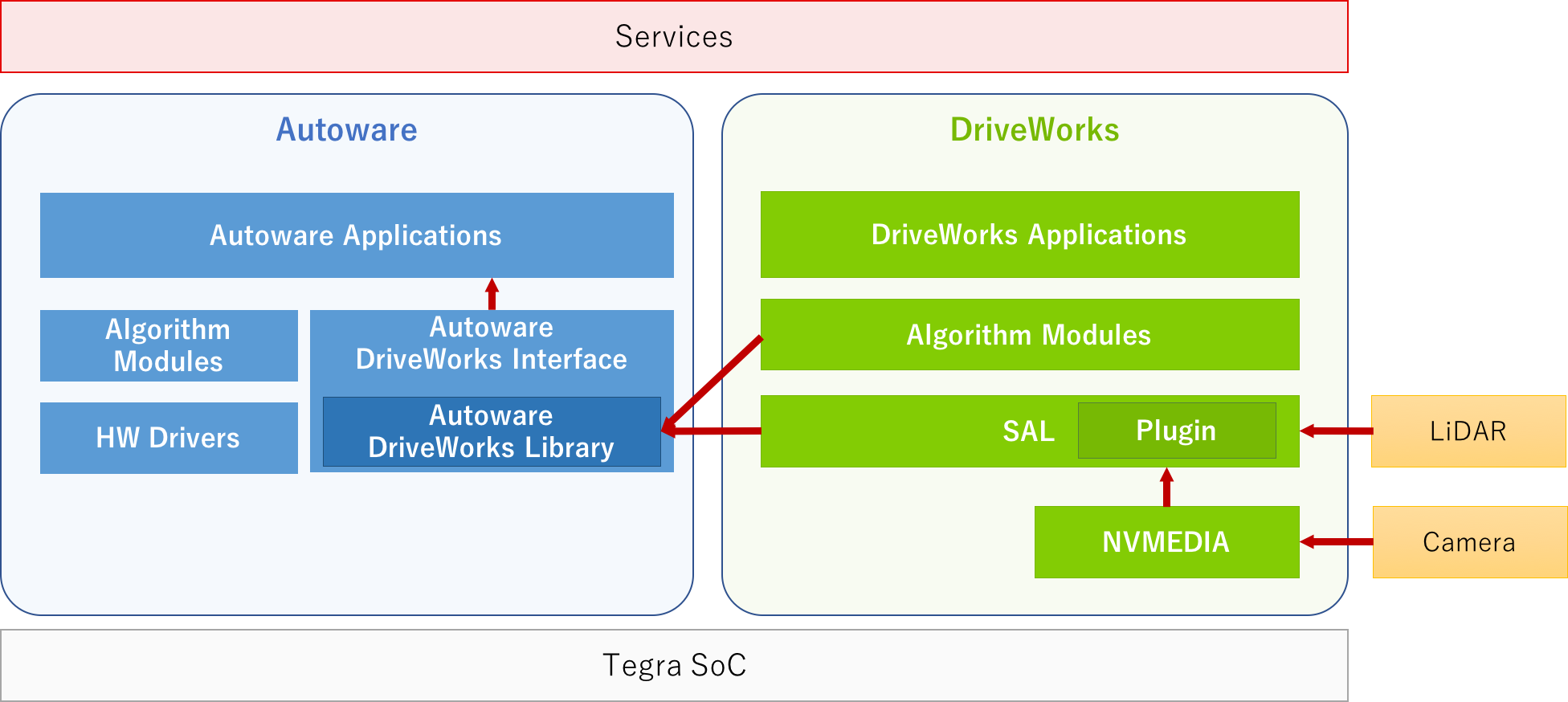
Autoware integrates a ROS interface to communicate with the DriveWorks API. This interface is provided as the autoware_driveworks_interface package, where the actual codebase is protected by the binary format due to a proprietary constraint of DriveWorks. When using DriveWorks with Autoware, we encourage you to use the DriveWorks Sensor Abstraction Layer (SAL), which provides a universal interface for different sensors, such as LiDARs and cameras, to be efficiently managed on the DRIVE PX2 platform.
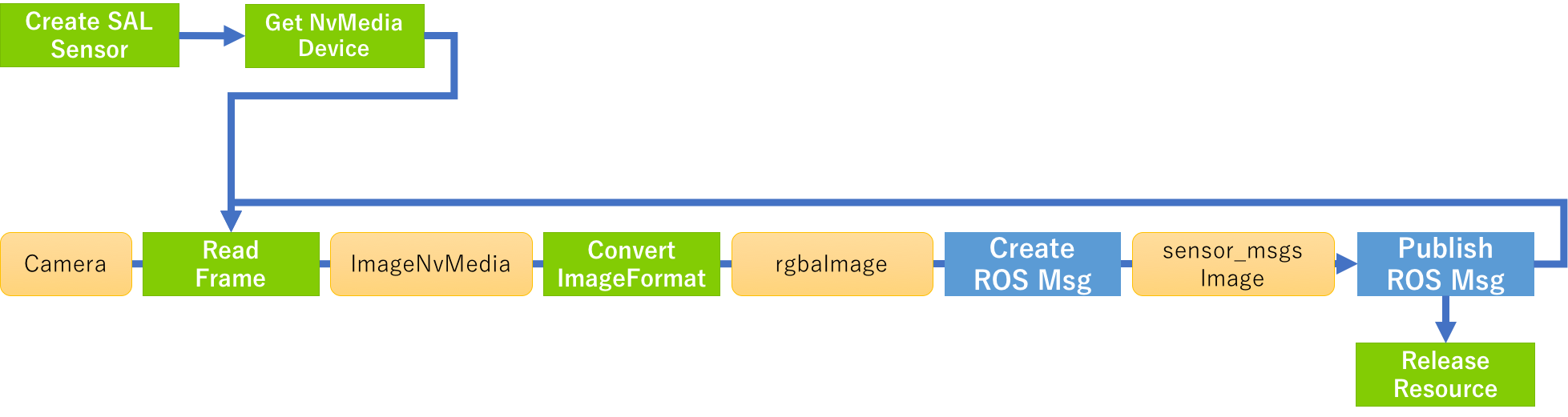
Basic Flow of Image Sensing with GMSL Cameras
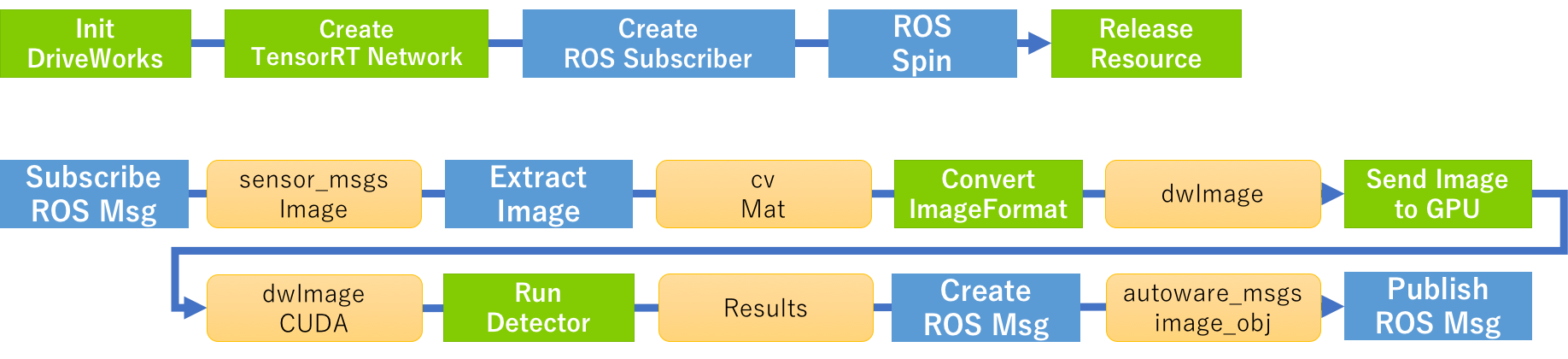
Basic Flow of Image Recognition with TensorRT