Beginners Software Setup - arthurbenemann/ardupilot GitHub Wiki
beginner's guide, setting up the software.
Setting up the Ardupilot software
The Ardupilot software uses the Arduino environment to compile and download to the Ardupilot board. Here's how to set up the Arduino environment and build Ardupilot Mega and ArduCopter.
Download and install the Arduino Software
- The software is here: http://arduino.cc/en/Main/Software.
- Get the latest version for the OS you're working on.
Set up a Working Environment
- This is a software project, and tidy housekeeping now will pay off handsomely in the end!
- Choose a base directory for your ArduPilot projects. A good choice for a simple build is My Documents (windows) or Documents/ (mac).
Download and unzip the Ardupilot Software
- http://code.google.com/p/ardupilot-mega/downloads/list
- The filename will look something like: ArduPilotMega1.02.zip
- Unzip this into your Documents folder.
Download and unzip the Arducopter Software
- http://code.google.com/p/arducopter/downloads/list
- The filename will look something like: Arductopter RC2.zip
- Unzip this into your Documents folder.
Set up the Libraries
- Open the Arduino Properties menu and note the sketchbook location.
- (by default, this is something like My Documents/Arduino)
- In that folder, make sure there is a sub-folder called libraries.
- copy all the folders in ArduPilot/libraries to the subfolder.
- Do the same for ArduCopter software. There will be a couple of folders which are duplicated.
- restart the Arduino program. These libraries should now be available during compiliation.
Test your installation
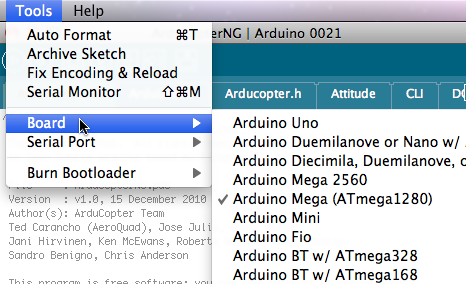
- Start the Arduino program
- set the board type to Arduino Mega (ATmega1280) https://lh5.googleusercontent.com/-prbp5EBPDt0/TXhdulcCIqI/AAAAAAAAAdw/T4oVcgQJ9X0/s1600/ArduinoScreenSnapz001.png
- Open the standard "blink" Arduino Demo: File / Examples / 1.Basics / Blink
- Compile by pressing the "Verify" button.
- If that works, add the line "#include <FastSerial.h>" to the beginning of the file.
- Compile again. If this works, your libraries have been installed.
- If it doesn't work, pull out lots of hair, gnash your teeth, and let me know what you did to fix things.
{kind=link}
Build the Ardupilot Software
- set the board type to Arduino Mega (ATmega1280)
- Load the main ArduPilot program, ArduPilotMega/ArduPilotMega.pde
- Edit APM_Config.h, and #define GPS_Protocol. If you are using the recommended beginner setup, you will have a MediaTek GPS and can just uncomment the #define line.
- Click the Verify button. If everything is working normally, the system should work for a while and give you a sketch size. Binary sketch size: 69446 bytes (of a 126976 byte maximum)
- Note that you may need to set other things in APM_Config. See where is says "READ THIS. REALLY! READ THIS."? Take that advice, but for now we're just making sure we can compile the project.
Build the Arducopter Software
- set the board type to Arduino Mega (ATmega1280)
- Load the main ArduCopter program, ArduCopter/ArduCopterNG.pde
- Click the Verify button. If everything is working normally, the system should work for a while and give you a sketch size. Binary sketch size: 54816 bytes (of a 126976 byte maximum)