etape 2 installer pypilot - arthur-expeditions/pypilot-workbook-fr GitHub Wiki
Dans cette étape, vous allez installer pypilot. Dans Openplotter, c'est très facile. En se référant à l'histoire ci-dessus, cela va installer le composant logiciel pypilot et le composant interface utilisateur d'Openplotter.
- Le coin supérieur gauche montre une icône de framboise. C'est votre menu de démarrage. Quand je mentionne Raspberry, je désigne cette icône.
- Cliquez sur Raspberry -> Openplotter -> Settings. Dans le premier onglet, vous verrez une liste d'applications Openplotter. Vous verrez
Press refreshau moins 7 fois sur votre écran, alors ne l'ignorez pas. Il s'agit de ce bouton :

- À ce stade, le panneau des paramètres se bloque parce qu'il essaie d'accéder à l'internet. Vous pouvez maintenant essayer d'agir comme un professionnel de l'informatique intelligent, en essayant quelque chose pour lequel vous n'avez pas besoin de vous lever de votre chaise, ou vous pouvez vous procurer un bon vieux câble Ethernet et le brancher au raspberry. Pour le plaisir d'aller de l'avant, je suggère cette dernière solution. L'écran va se rafraîchir avec les numéros de version.
- Faites défiler jusqu'à Pypilot, cliquez dessus, installez-le, dites oui. Cela prendra quelques minutes. Vous aurez amplement le temps de vous offrir une tasse de thé.
- Quand c'est fait, vous verrez un nouvel élément de menu Raspberry -> Openplotter -> Pypilot. Cliquez dessus. Cela fait apparaître votre première interface utilisateur pypilot, l'interface utilisateur openplotter.
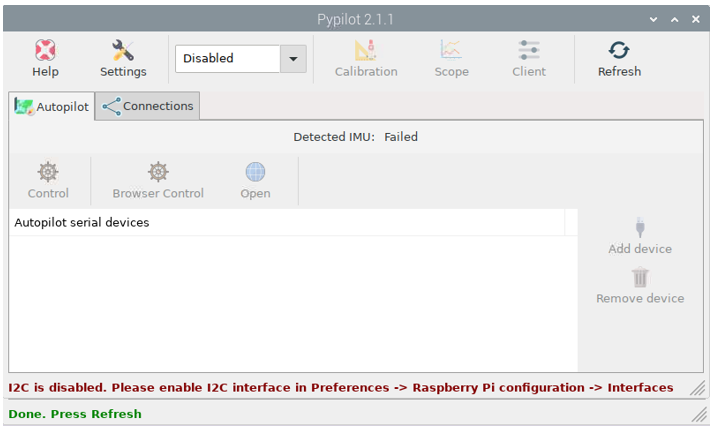
pas ok
- Il y a 3 détails qui ne vont pas ici. Premièrement, il n'a pas réussi à détecter un "IMU". Or nous avons vu que pypilot a besoin d'un IMU. Celui-ci doit être relié par 4 fils au connecteur GPIO du raspberry. Si vous êtes malin, vous en avez commandé un à l'avance dans la boutique de pypilot et vous avez juste à le fixer sur le GPIO. Si vous pensez avoir été malin et que vous avez commandé un clone sur une boutique en ligne douteuse, vous devez souder des fils pour connecter 3v3, SCL, SDA et GND et croiser les doigts.

-
La ligne inférieure de l'écran indique que vous devez activer
i2c. Allez dans Raspberry -> Preferences -> Raspberry Pi configuration, cliquez sur l'onglet Interfaces et activez i2c. Retournez à l'interface utilisateur de pypilot et cliquez surRefresh. L'IMU est maintenant visible. -
Enfin, changez
DisabledenAutopilot. Lorsque les changements sont appliqués, vous avez un pypilot fonctionnel ! Ne laissez pas votre thé refroidir.

ok