Disable Collisions - alanjfs/houdini_wiki GitHub Wiki
How do you disable collisions between a pair of rigid bodies?
Using @collisiongroup and @collisionignore
The RBD Packed Object documentation lists two attributes involving collisions that are of relevance.
@collisiongroupAdd an object to a group@collisionignoreExclude collisions with objects in a group
s@collisiongroup = "boxes";
s@collisionignore = "boxes";
Thus, both adding and ignoring objects of the same group results in everything in the group acting independently.
Using Constraints
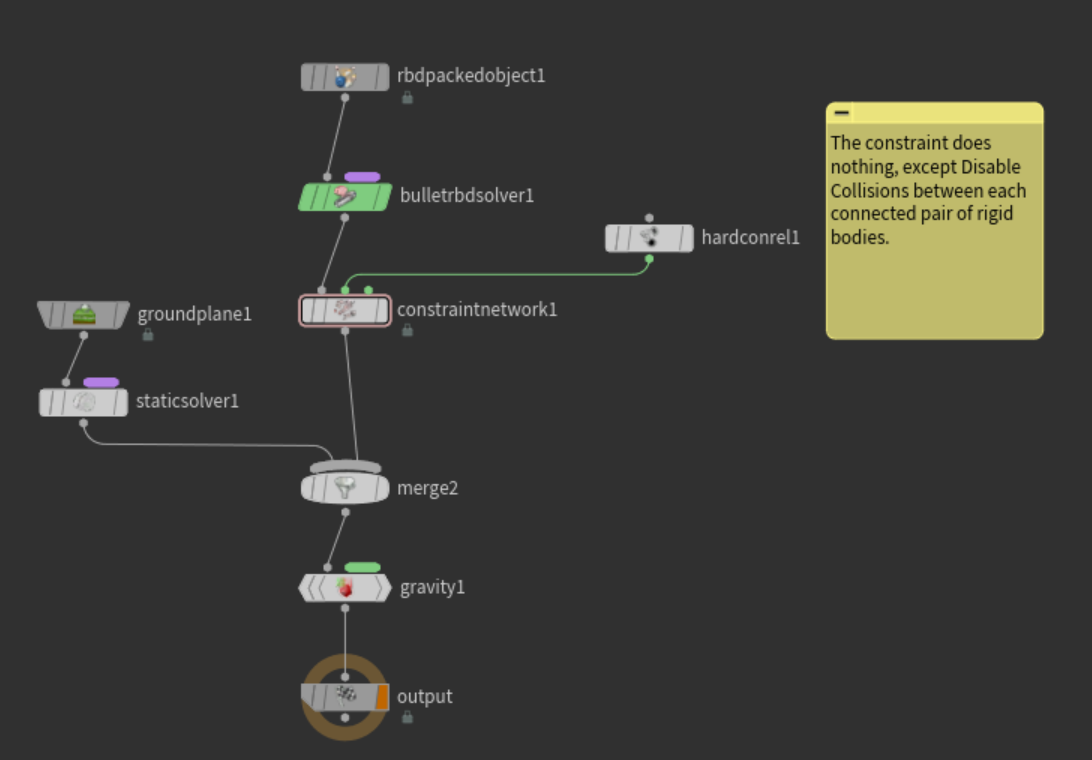
Another method is making a Hard Constraint that does nothing except disable collisions.
Walkthrough
Let's go through the wrangles first.
setup_boxes
Running over points, this merely adds a unique name and offsets each box into a 3x3 grid.
int i = detail(1, "iteration");
int row = i / 3;
int col = i % 3;
vector pos = set(col, row, 0);
v@P += pos * chv("offset") + { 0, 1, 0 };
s@name = sprintf("box%d", i);
create_null_constraints
Also running over points, this adds a constraint between each packed primitive, and every other packed primitive. Disabling of collisions is specified between exactly two pairs of rigid bodies, so we'll do it pow(2, number_of_rigids) times.
int others[] = expandpointgroup(0, "");
// Constrain this point to all other points
for (int other : others) {
if (other == @ptnum) continue;
int con = addprim(0, "polyline", @ptnum, other);
setprimattrib(0, "constraint_name", con, "Hard");
setprimattrib(0, "constraint_type", con, "position");
}
i@condof = 0; // Free movement
DOP Network
Nothing fancy, there's a packe rigid body along with a constraint network, to bring in geometry from the first and second context input of the network.