2020 09 10 Threshold offset plots T=80k - WojciechMigda/TruRL GitHub Wiki
Run parameters:
Episodes: 1000
max_episode_steps: 500
KBinsDiscretizer({
{34, -4.800000, 4.800000},
{34, -2.600000, 2.600000},
{34, -0.418000, 0.418000},
{34, -3.000000, 3.000000},})
TsetliniClassifierBitwise({
"threshold": <#####>,
"s": 4.000000,
"number_of_regressor_clauses": 3200,
"number_of_states": 127,
"boost_true_positive_feedback": 1,
"random_state": 1,
"n_jobs": 6,
"clause_output_tile_size": 16,
"weighted": true,
"max_weight": 2147483647,
"verbose": false
})
Three Threshold offset values were examined: 0, 1600, and 3200.
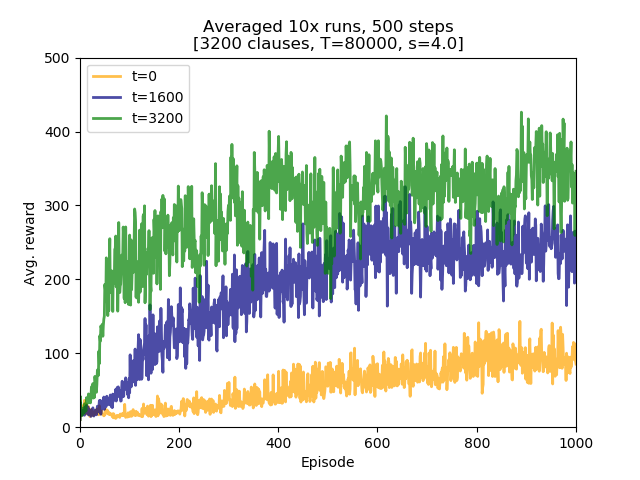
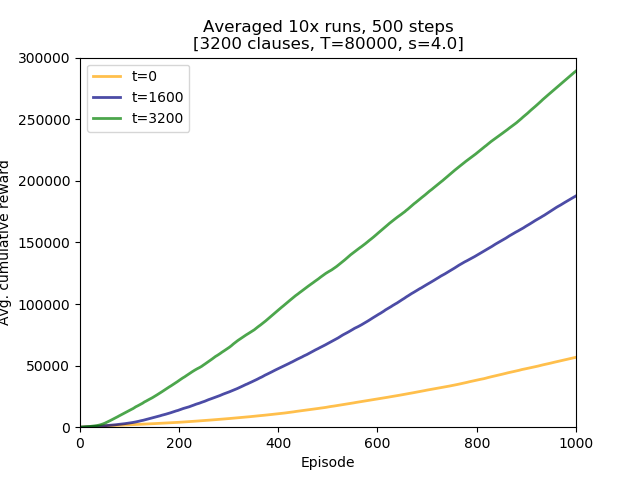
Conclusions:
- further increase of Threshold, 2.5x from 32000 to 80000, helped with learning, compared to earlier runs with both 32000 and 64000,
- using Threshold offsets boosts learning speed. This improved performance is maintained, similarly to the T=64000 runs,
- for Threshold offset value of 3200 initial learning speed resembles one observed for experiments with
max_episode_steps=200, - used parameter set is insufficient to learn the model so as it would get close to an average reward of 500.
steps_500_Toff.py
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import plac
import numpy as np
import pandas as pd
def main():
df = pd.read_csv('steps_500_Toff.csv', header=None, names=['t0', 't1600', 't3200'])
import matplotlib.pyplot as plt
plt.figure()
lw = 2
plt.plot(df.index + 1, df['t0'], lw=lw, color='orange', alpha=0.7, label='t=0')
plt.plot(df.index + 1, df['t1600'], lw=lw, color='navy', alpha=0.7, label='t=1600')
plt.plot(df.index + 1, df['t3200'], lw=lw, color='green', alpha=0.7, label='t=3200')
plt.xlabel("Episode")
plt.ylabel("Avg. reward")
plt.xlim(1, 1000)
plt.ylim(0, 500)
plt.title("Averaged 10x runs, 500 steps\n[3200 clauses, T=80000, s=4.0]")
plt.legend(loc='upper left')
plt.show()
return 0
if __name__ == '__main__':
plac.call(main)steps_500_Toff_AUC.py
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import plac
import numpy as np
import pandas as pd
def main():
df = pd.read_csv('steps_500_Toff.csv', header=None, names=['t0', 't1600', 't3200'])
df = df.cumsum(axis=0)
import matplotlib.pyplot as plt
plt.figure()
lw = 2
plt.plot(df.index + 1, df['t0'], lw=lw, color='orange', alpha=0.7, label='t=0')
plt.plot(df.index + 1, df['t1600'], lw=lw, color='navy', alpha=0.7, label='t=1600')
plt.plot(df.index + 1, df['t3200'], lw=lw, color='green', alpha=0.7, label='t=3200')
plt.xlabel("Episode")
plt.ylabel("Avg. cumulative reward")
plt.xlim(1, 1000)
plt.ylim(0, 300000)
plt.title("Averaged 10x runs, 500 steps\n[3200 clauses, T=80000, s=4.0]")
plt.legend(loc='upper left')
plt.show()
return 0
if __name__ == '__main__':
plac.call(main)Location: /experiments/2020-09-09_step500_T80k_Toff
Logs were created by running /experiments/run.sh script (invocation parameters hardcoded inside). Logs were transformed into CSV file with averaged runs by executing /experiments/run_csv.py:
../run_csv.py steps_500_Toff.csv run_test3.log run_test1.log run_test2.log
4e67acb724178ee6a87b4e08d4a14fd113233293