人間協調ロボットシステム - Uchihira/iot-bmc GitHub Wiki
人間協調ロボットシステム
属性
- ビジネス主体: メーカー
- 具体的事例:日立の「Lumada」 https://www.hitachi.co.jp/products/it/lumada/
ビジネスモデルキャンバス
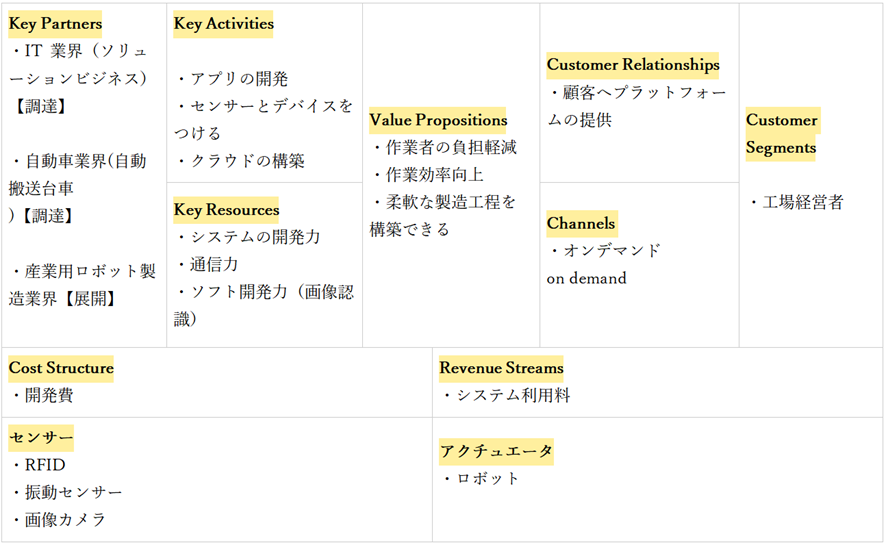
本ビジネスモデルのポイントの説明:
ダイキンと日立製作所は、画像解析技術(KR)を用いた「ろう付け技能訓練支援システム」を開発した。高度技能者の作業の様子を撮影し、その画像を解析し、模範的な動作モデルを作成する。このモデルと訓練者の動きを比較することで、高度な技術を効率的に習得することを可能にする(VP)。
構築ブロック詳細
- 顧客セグメント
- 工場経営者
- 価値提案
- 作業者の負担軽減
- 作業効率向上
- 柔軟な製造工程を構築できる
- チャネル
- オンデマンド
- 顧客との関係
- 顧客へプラットフォームの提供
- 収益の流れ
- システム利用料
- リソース
- システムの開発力
- 通信力
- ソフト開発力(画像認識)
- 主要活動
- アプリの開発
- センサーとデバイスをつける
- クラウドの構築
- パートナー
- IT業界(ソリューションビジネス)(調達)
- 自動車業界(自動搬送台車)(調達リソース)
- 産業用ロボット製造業界(展開リソース)
- コスト構造
- 開発費