Waterloo Steel:Platform Launch Instruction - UW-Advanced-Robotics-Lab/lab-wiki GitHub Wiki
[Last generated: Wed 4 Oct 2023 14:07:38 EDT]
- 1. Power On
- 2. Power Off
- 3. Waterloo Steel Demo [Jack]
- A. Troubleshoot
- B. Hardware Guide
- if you want internet access (eg, update local repository), please connect to:
- WAN port of the robot <-----> LAN port of the Router
- if you want Remote access with AnyDesk to the robot network,
- you may want your PC connecting to the Lab Wifi
- and connect the ethernet from robot LAN to Laptop
- we should see the green button (for jetson pc) is lighting on
- fan spinning, and everything should be powered except WAM
- Make sure the LED panel is powered on, and will show ERROR as the WAM has not been calibrated and launched by default
- We should be able to launch the controller
-
Launch the joystick controller by touching [Launch UWARL Summit Controller] App Icon
- 🚨 If the controller app quits after launching, [A.1 Deck Controller Cannot Launch:]
- [OPTIONAL] 📓 You may launch the rviz by touching [Launch Rviz] App Icon
📓 Icon apps are installed by
uwarl-robot_configtoolchain, and allow us to use the basic interface without keyboard.
- 1️⃣ > Launch Pad
- 2️⃣ > Rviz Viewer
⚠️ If possible, ssh into the jetson and summit PC to shutdown the PC first# jetson: $ ssh [email protected] # summit: $ ssh ssh [email protected]
- Long Press Green Button to power off the Jetson PC
- Turn off the WAM power rails
- Turn off the overall power rails
- Turn off the screen of the steam deck by pressing power button briefly once, and put into charger.
- we dont want a reboot of steam deck
$ ssh [email protected]
$ roslaunch waterloo_steel_supervisor multi_intel_camera.launch🚨 If the launch is not successful:
- Check the hardware USB C cable connections to both cameras
- [Ask Jack if you need to] Launch individual cameras separately for the system to register individual camera IDs
# 1. connect to jetson
$ ssh [email protected]
# 2. start a tmux session
$ tmux
### TIPS:
# create multiple windows with:
# [ctrl + b] then ["] : split horizontal
# [ctrl + b] then [%] : split vertical
# [ctrl + b] then [arrow-keys] : switch window selection
# [ctrl + b] then [:] and [type: set mouse on] : to enable mouse selection and scroll and window adjustment
# 3. launch wam node:
$ roslaunch wam_node wam_node.launch
### WAM Activation Instruction:
# 1. release all E-stops
# 2. [shift & activate] on control pendant (the one with E-stop inside the cabinet)
# 3. [Enter] on the keyboard to confirm default home-position
# Now, you will hear the gear activating
### TIPS:
# launch other nodes: 1.2 camera & 1.4 demo node in different tmux windows
# 4. detach to keep running in background and independent from your laptop terminal:
# [ctrl + b] then [:] and [type: dettach]$ roslaunch waterloo_steel_supervisor waterloo_steel_demo.launch
# command to perform demo:
$ rosservice call /waterloo_steel/start_demo "demo_id: 2"$ ls ~/.ros/bagfiles/waterloo_steel_demo/session_{id}/🚨 If the controller app quit after launching, it is likely due to the following issues:
-
The deck is not connected to summit wifi "UWARL_171102A_5G"
🛠️ Connect to the wifi manually at the status bar
-
The summit is not hardware ready:
🛠️ Please reset (engage and release) the E-Stop at the rear of the SUMMIT base
-
There is no ros core in the network OR any other detailed issues → The Summit Base ROS Controller and ROS Core were not launched successfully nor enabled:
🛠️ Please SSH into the summit base and troubleshoot from there:
# SSH into adlink mxe211 (summit) $ ssh [email protected] # check if summit bringup is successful $ systemctl status --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch # [DEBUG] - print out last msg (double-check time-stamp): $ journalctl --follow --user --user-unit=roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch.service > log.txt # [DEBUG] - Live Stream: $ journalctl --follow --user --user-unit=roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch.service # stop/restart $ systemctl stop --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch $ systemctl restart --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch # You may want to check if the workspace is at the right target, and built successfully: $ check_ws_status $ build_ws $ src_all
$ rosnode ping -c 4 rosout
rosnode: node is [/rosout]
pinging /rosout with a timeout of 3.0s
xmlrpc reply from http://ann:46635/ time=1.195908ms
xmlrpc reply from http://ann:46635/ time=1.123905ms
xmlrpc reply from http://ann:46635/ time=1.144886ms
xmlrpc reply from http://ann:46635/ time=1.137018ms
ping average: 1.150429ms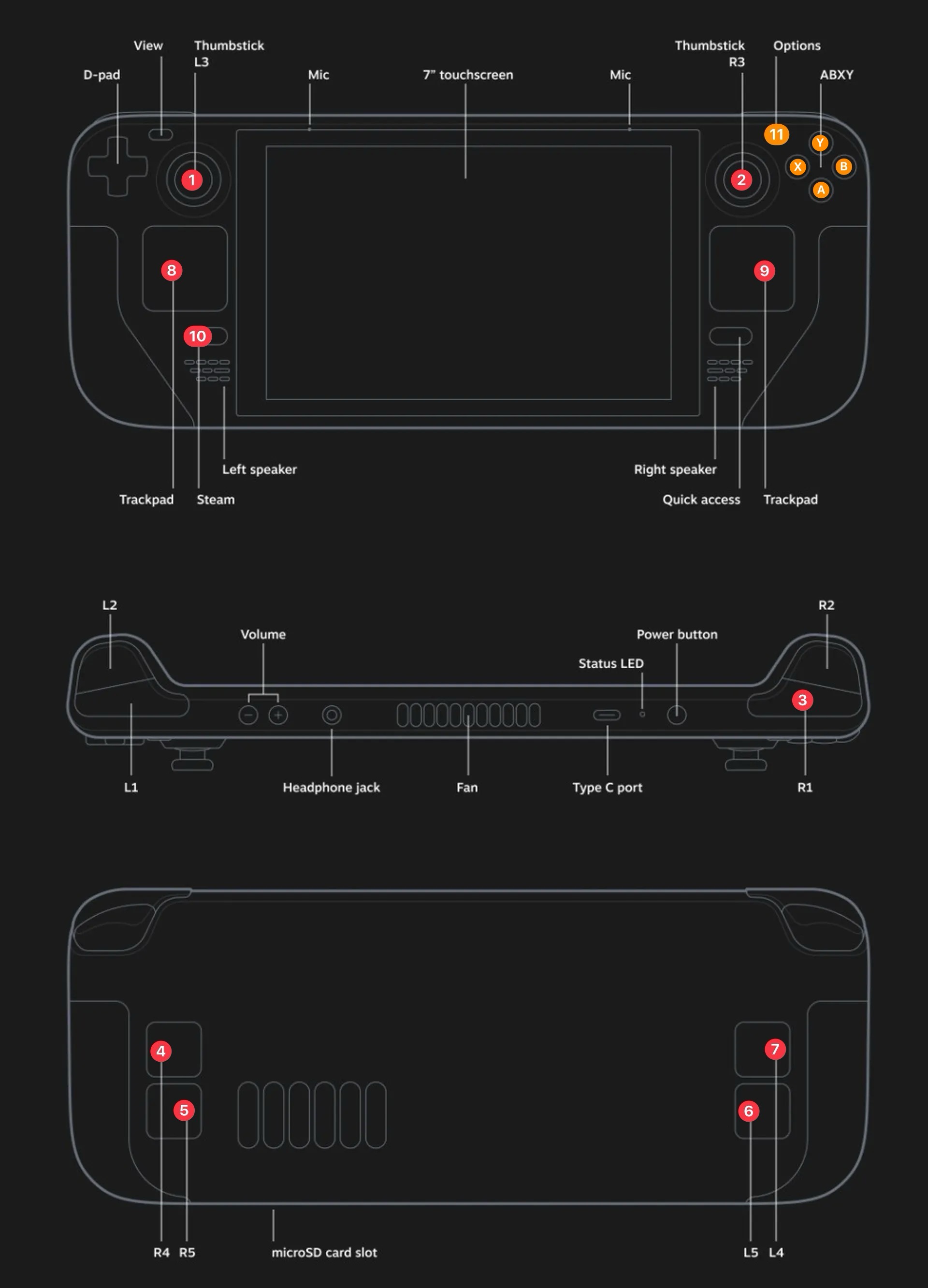
-
Launch the joystick controller by touching [Launch UWARL Summit Controller] App Icon
-
Button Layouts:
- Hold 3️⃣ [R1] + Move Up/Down 1️⃣ [L3] : Forward/Reverse
- Hold 3️⃣ [R1] + Move Left/Right 2️⃣ [R3] : CCW/CW
- Hold 3️⃣ [R1] + Press (11) [Options] : Omni / Skid Mode
- 4️⃣ [R4] : Scroll Up
- 5️⃣ [R5] : Scroll Down
- 6️⃣ [L5] : Left Mouse Click for Mouse Menus
- 7️⃣ [L4] : Enter
- 8️⃣ [Left Trackpad] Button Click : Arrow Key Up/Down/Left/Right
- 9️⃣ [Right Trackpad] : Mouse Move + Mouse Right Click
- 🔟 [Steam] : Menu Selection ---> Used to switch between Steam OS / ArchLinux Mode + Power/Restart