Waterloo Steel:Platform Instruction - UW-Advanced-Robotics-Lab/lab-wiki GitHub Wiki
[Last generated: Wed 22 Nov 2023 19:34:09 EST]
- 0. General:
- 1. Power On Instruction:
- 2. Adlink MXE 211 (SUMMIT + Lidar PC)
- 3. Jetson Orin (WAM + Vision PC)
- 4. Internal WAM PC
- 5. Steam Deck Controller
- 6. AMCL Mapping Instruction
- Appendix A - Utilities
- Appendic B - Troubleshoot:
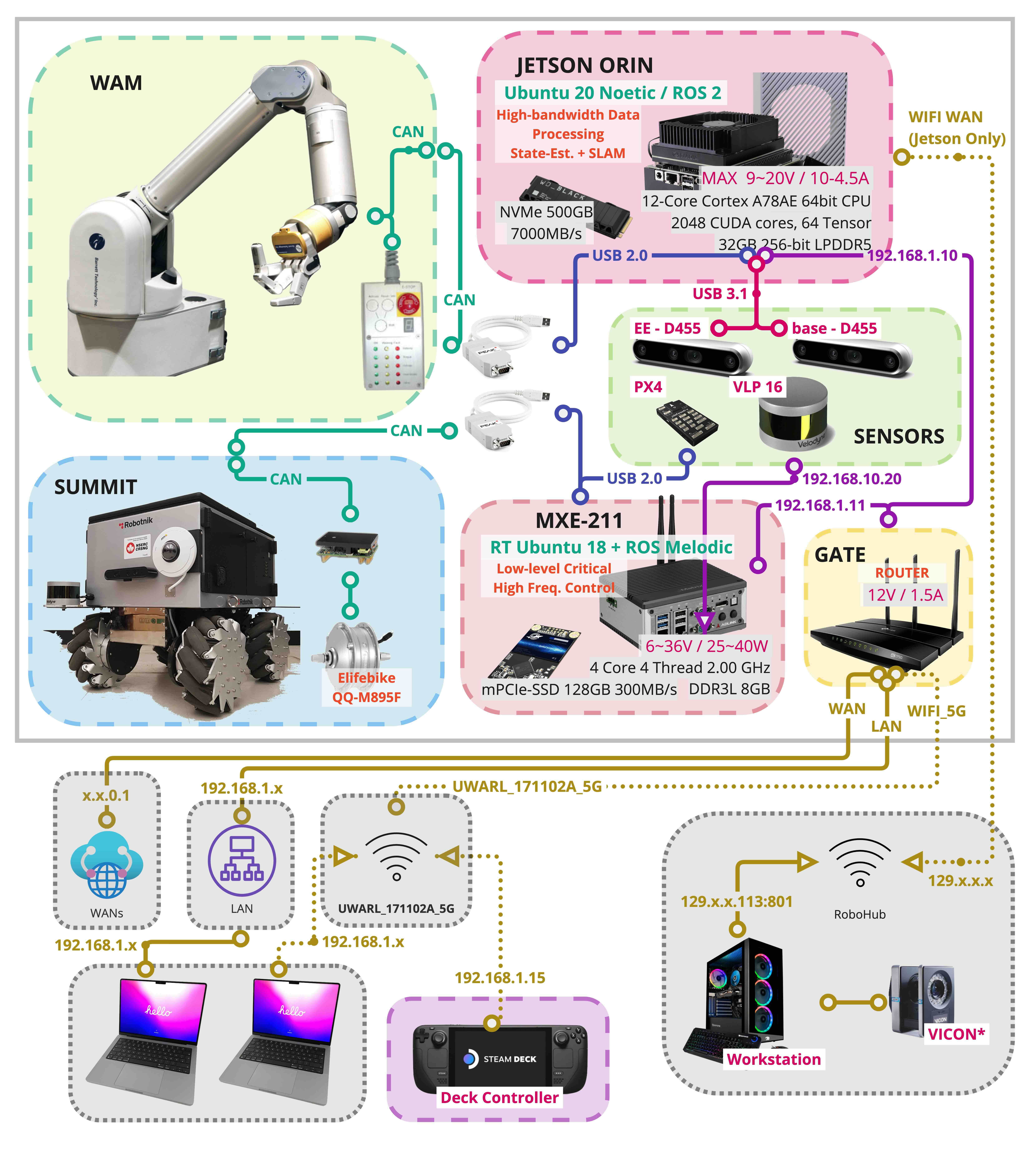
- C. System Architecture:
- MXE 211 should auto-launch the summit-xl
- See up-to-date details from: *2. ⭐ Unified Development 🚧 [Local PC / Summit / WAM] (Melodic/Noetic):*
- See up-to-date details from: *3. ROS UWARL_catkin_ws Usage Guide:*
-
UWARL_Robot_5G: Lab Network is a (AP:access point) wifi broadcasted by the Lab router to distribute secure networks for internet access (192.168.5.x) -
UWARL_17110A_5G: Robot Network Wifi is a (AP: access point) wifi broadcasted by the an on-robot router to distribute ROS network the wireless 5GHz network (192.168.1.x) - (Jetson Wifi): is an isolated wifi card to allow Jetson connecting to an explicit DHCP access point
- The network will be isolated from the robot, only jetson will be seeing it, (unless forwarded to the local robot network through Jetson network configuration.)
- Use Case: logging Ground Truth data from Vicon via UDP streaming, and a ROS node on Jetson will format and broadcast the data in the local ROS network
Need to connect the laptop to the robot network via LAN or Wireless
# Jetson:
ssh [email protected]
# Adlink:
ssh [email protected]
# Internal-WAM PC: (if ethernet is plugged in)
ssh [email protected]Need to connect the laptop to the robot network via LAN or Wireless

- if you want internet access (eg, update local repository), please connect to:
- WAN port of the robot <-----> LAN port of the Router
-
if you want Remote access with AnyDesk to the robot network,
-
you may want your PC connecting to the Lab Wifi
-
and connect the ethernet from robot LAN to Laptop
-
- Alternatively,
- you can connect PC to Lab Network wireless via wifi
- and connect your PC to Global Internet (Lab Router) via ethernet cable

- first make sure the E-stop for Base is engaged
- by twisting power knobs for Base
- we should see the green button (for jetson pc) is lighting on
- fan spinning, and everything should be powered except WAM
-
by twisting power knobs for WAM
-
Make sure the LED panel is powered on, and will show ERROR as the WAM has not been calibrated and launched by default
- By default it will boot up into game controller interface,
- if so, switch to the desktop mode
- Prefer in sleep mode, so never turn off deck, but leave it charge and put into sleep mode (screen off)
- We should now be able to launch the controller
Important
- Otherwise, try to ssh into summit PC, and
$ summit_systemctl statusto check system status
- Launch the joystick controller by touching [Launch UWARL Summit Controller] App Icon
- 🚨 If the controller app quits after launching, [A.1 Deck Controller Cannot Launch:]
- [OPTIONAL] 📓 You may launch the rviz by touching [Launch Rviz] App Icon
📓 Icon apps are installed by
uwarl-robot_configtoolchain, and allow us to use the basic interface without keyboard.


⚠️ If possible, ssh into the jetson and summit PC to shutdown the PC first# jetson: $ ssh [email protected] # summit: $ ssh ssh [email protected]
- Long Press Green Button to power off the Jetson PC
- Turn off the WAM power rails
- Turn off the overall power rails
- Turn off the screen of the steam deck by pressing power button briefly once, and put into charger.
- we dont want a reboot of steam deck
- PS4 Controller is no longer launched by default, as the rs4 node is being launched on [Steam Deck]
$ rm -rf ~/UWARL_catkin_ws
$ cd_config
$ ./scripts/auto-config_UWARL_catkin_ws.zsh-
Power on the robot, wait for computers to auto-boot
-
Check if default launch successful:
# SSH into adlink mxe211 (summit) $ ssh [email protected] # check if summit bringup is successful $ systemctl status --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch # stop/restart $ systemctl stop/restart --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch # [DEBUG] $ journalctl --user --user-unit=roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch > log.txt # [DEBUG] - Live Stream: $ journalctl --follow --user --user-unit=roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch
# launch wam node:
$ roslaunch wam_node wam_node.launch
# example commands:
$ rosservice call /wam/go_home
$ rosservice call /wam/joint_move "joints:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0"$ ssh [email protected]
$ roslaunch waterloo_steel_supervisor multi_intel_camera.launchIn order to connect over the Inernal WAM PC (to check if the WAM, under Real-time operation, is performing correctly), download the wamdiscover.py from the Barrett file repository. This will give you the current WAM-IP and allow you to connect to it directly.
Useful info on setting up programs to use the libbarrette library can be foundhere.
- Launch the joystick controller by touching [Launch UWARL Summit Controller] App Icon
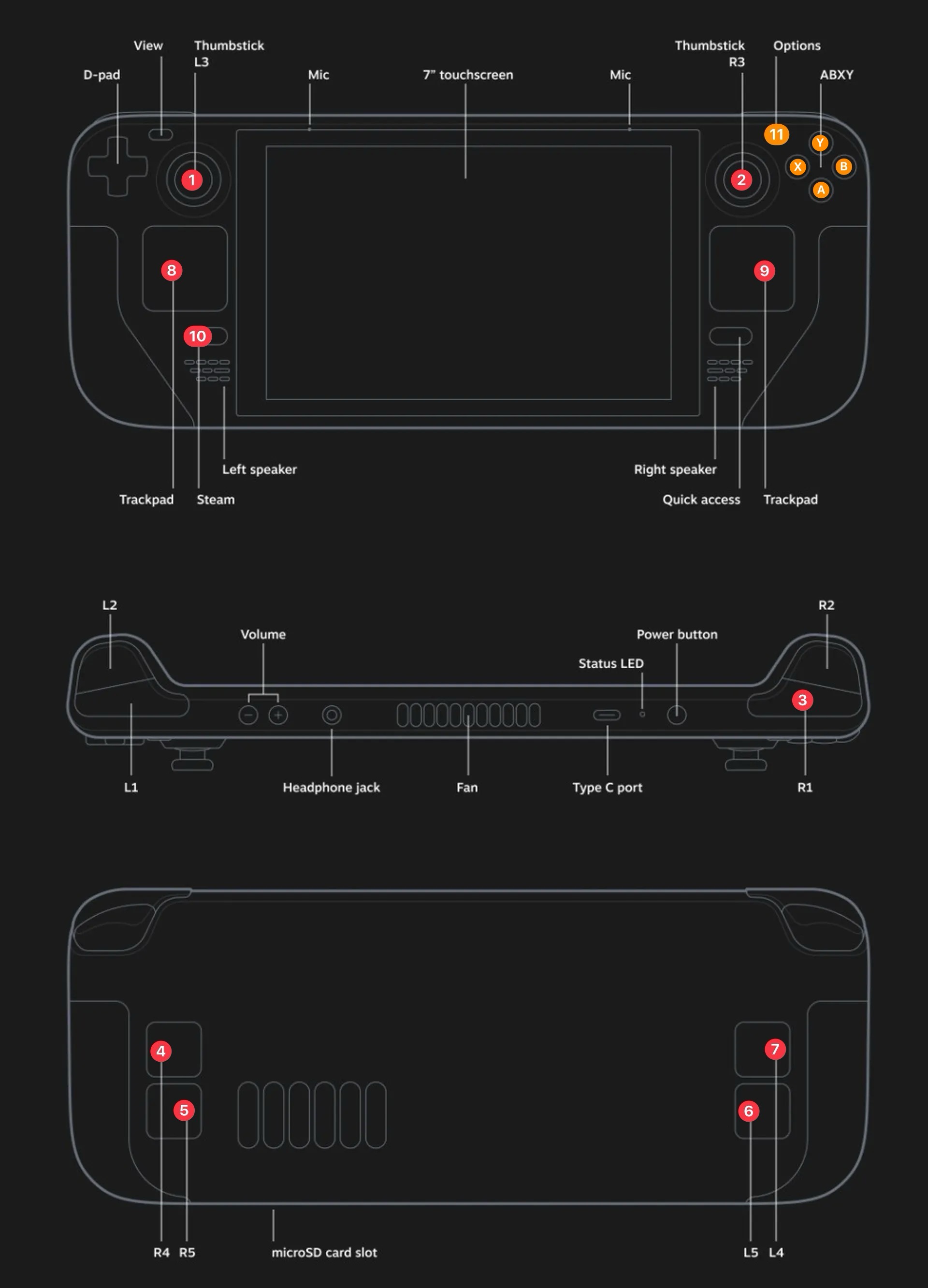
- Button Layouts:
- Hold 3️⃣ [R1] + Move Up/Down 1️⃣ [L3] : Forward/Reverse
- Hold 3️⃣ [R1] + Move Left/Right 2️⃣ [R3] : CCW/CW
- Hold 3️⃣ [R1] + Press (11) [Options] : Omni / Skid Mode
- Hold 3️⃣ [R1] + Press [Y] Speed Up ++
- Hold 3️⃣ [R1] + Press [A] Speed Down --
- Hold 3️⃣ [R1] + Press [X/B] 🚫 NOT IMPLEMENTED
- 4️⃣ [R4] : Scroll Up
- 5️⃣ [R5] : Scroll Down
- 6️⃣ [L5] : Left Mouse Click for Mouse Menus
- 7️⃣ [L4] : Enter
- 8️⃣ [Left Trackpad] Button Click : Arrow Key Up/Down/Left/Right
- 9️⃣ [Right Trackpad] : Mouse Move + Mouse Right Click
- 🔟 [Steam] : Menu Selection ---> Used to switch between Steam OS / ArchLinux Mode + Power/Restart
- You may check the button id using the software GUI: joystick
- You may assign these button id to summit ws files on summit-pc:
~/UWARL_catkin_ws/waterloo_steel/waterloo_steel_interface/summit_xl_pad/config/uwarl_deck.yaml
- 1️⃣ > Launch Pad
- 2️⃣ > Rviz Viewer
$ roslaunch summit_xl_pad waterloo_steel_summit_deck.launch$ rosrun rviz rvizImportant
- Before launching, make sure the robot is aligned with an edge of the wall in the center of the room for best result
- Make sure in slow speed when creating the map
$ ssh [email protected]## comment out navigation for summit
$ sudo vim ~/UWARL_catkin_ws/src/uwarl-summit_xl_robot/waterloo_steel_summit_bringup/launch/waterloo_steel_summit.launch
## As below:
# <!-- include file="$(find summit_xl_navigation)/launch/summit_xls_navigation.launch" >
# <arg name="id_robot"
# value="$(arg id_robot)"/>
# </include -->
## restart summit roscore:
$ summit_systemctl restart
## to see if the summit core launched successfully, see journal logs as:
$ summit_systemctl follow## slam mapping:
$ cd ~/UWARL_catkin_ws/src/uwarl-summit_xl_robot/waterloo_steel_summit_bringup
$ roslaunch summit_xl_localization slam_gmapping.launch
- Now, you may leash the robot slowly across the room from edge to edge.
Important
- Keep a distance of at least 0.5 meters between the robot and the objects you want to capture. Objects within this distance will not be captured.
- Make sure your legs are not captured as an object. Therefore, stay in the blind spot of the robot or keep walking around.
$ cd ~/UWARL_catkin_ws/src/uwarl-summit_xl_common/summit_xl_localization/maps/{Building-floor-folder}
## Before kill slam_gmapping.launch, save the final map as:
$ rosrun map_server map_saver -f {map_name_date}
## Example:
$ cd ~/UWARL_catkin_ws/src/uwarl-summit_xl_common/summit_xl_localization/maps/UW_E7_1ST
$ rosrun map_server map_saver -f map_robothub_2023-11-08$ cp ~/UWARL_catkin_ws/src/uwarl-summit_xl_common/summit_xl_localization/maps/UW_E7_1ST/map_robothub_2023-11-08.pgm ~/UWARL_catkin_ws/src/uwarl-summit_xl_common/summit_xl_localization/maps/map_in_use/map.pgm
$ cp ~/UWARL_catkin_ws/src/uwarl-summit_xl_common/summit_xl_localization/maps/UW_E7_1ST/map_robothub_2023-11-08.yaml ~/UWARL_catkin_ws/src/uwarl-summit_xl_common/summit_xl_localization/maps/map_in_use/map.yaml
## Modify Map In Use:
$ vim ~/UWARL_catkin_ws/src/uwarl-summit_xl_common/summit_xl_localization/maps/map_in_use/map.yaml
## so that it is targeting map.pgm
⚠️ I think this can be automated in robot env, or config tools. Someone makes it :P -- Jack
[TODO]
$ rosnode ping -c 4 rosout
rosnode: node is [/rosout]
pinging /rosout with a timeout of 3.0s
xmlrpc reply from http://ann:46635/ time=1.195908ms
xmlrpc reply from http://ann:46635/ time=1.123905ms
xmlrpc reply from http://ann:46635/ time=1.144886ms
xmlrpc reply from http://ann:46635/ time=1.137018ms
ping average: 1.150429ms- Reads:
$ build_ws -DCMAKE_BUILD_TYPE=Debug
# in roslaunch file:
<launch>
<node name="wam_node" type="wam_node" pkg="wam_node" output="screen"
launch-prefix="gdb -ex run --args"
/>
</launch>-
Install:
-
$ sudo apt -y install valgrind $ sudo apt-get install kcachegrind # visualizer: #### roslaunch file add prefix: <launch> <node name="wam_node" type="wam_node" pkg="wam_node" output="screen" launch-prefix="valgrind --tool=callgrind --log-file=/home/uwarl-orin/JX_Logs/valgrind.log --callgrind-out-file='/home/uwarl-orin/JX_Logs/callgrind.wam_node.%p'" /> </launch>
-
-
Instructions:
-
$ build_ws -DCMAKE_BUILD_TYPE=Debug # enable core dumps: $ ulimit -a # check limits $ ulimit -c unlimited # unlimited # allow core dumps to be created: $ sudo echo 1 > /proc/sys/kernel/core_uses_pid
-
Instructions:
-
# make sure build with debug: $ build_ws -DCMAKE_BUILD_TYPE=Debug # OR: $ build_ws_debug # normal program run: $ rosrun vins vins_node $cam_config_file_path # run with valgrind: $ rosrun_valgrind vins vins_node $cam_config_file_path # -> check error causing memory dump: $ cat $HOME/valgrind_log.txt ##### OUTPUT: ==134393== Memcheck, a memory error detector ==134393== Copyright (C) 2002-2017, and GNU GPL'd, by Julian Seward et al. ==134393== Using Valgrind-3.15.0 and LibVEX; rerun with -h for copyright info ==134393== Command: /home/parallels/UWARL_catkin_ws/devel/lib/vins/vins_node /home/parallels/UWARL_catkin_ws/src/vins-research-pkg/VINS-Fusion/config/uwarl_d455/mono_rgb_imu_config_dual.yaml ==134393== Parent PID: 134030 ==134393== ==134393== Thread 7: ==134393== Invalid read of size 8 ==134393== at 0x4936B20: shared_count (shared_count.hpp:433) ==134393== by 0x4936B20: shared_ptr (shared_ptr.hpp:422) ==134393== by 0x4936B20: FeatureTracker::trackImage(double, cv::Mat const&, cv::Mat const&) (feature_tracker.cpp:199) ==134393== by 0x48B184B: Estimator::inputImage(double, cv::Mat const&, cv::Mat const&) (estimator.cpp:167) ==134393== by 0x19BCAB: sync_process() (rosNodeTest.cpp:126) ==134393== by 0x56B2FAB: ??? (in /usr/lib/aarch64-linux-gnu/libstdc++.so.6.0.28) ==134393== by 0x4E72623: start_thread (pthread_create.c:477) ==134393== by 0x596B49B: thread_start (clone.S:78) ==134393== Address 0x8 is not stack'd, malloc'd or (recently) free'd ==134393==
-
# options: $ rosrun_gdb $ rosrun_valgrind
rm -rf ~/.catkin_tools🚨 If the controller app quit after launching, it is likely due to the following issues:
-
The deck is not connected to summit wifi "UWARL_171102A_5G"
🛠️ Connect to the wifi manually at the status bar
-
The summit is not hardware ready:
🛠️ Please reset (engage and release) the E-Stop at the rear of the SUMMIT base
-
There is no ros core in the network OR any other detailed issues → The Summit Base ROS Controller and ROS Core were not launched successfully nor enabled:
🛠️ Please SSH into the summit base and troubleshoot from there:
# SSH into adlink mxe211 (summit) $ ssh [email protected] # check if summit bringup is successful $ systemctl status --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch # [DEBUG] - print out last msg (double-check time-stamp): $ journalctl --follow --user --user-unit=roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch.service > log.txt # [DEBUG] - Live Stream: $ journalctl --follow --user --user-unit=roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch.service # stop/restart $ systemctl stop --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch $ systemctl restart --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch # You may want to check if the workspace is at the right target, and built successfully: $ check_ws_status $ build_ws $ src_all