Waterloo Steel:Platform Development - UW-Advanced-Robotics-Lab/lab-wiki GitHub Wiki
[Last generated: Wed 4 Oct 2023 14:07:37 EDT]
- 1. Waterloo Steel Robot Manual Launch Instructions 🚧
- 2. Unified Development 🚧
- 3. Usage Guide With Tool Chain and Workspace:
- Appendix A - File Arch
-
MXE 211 should auto-launch the summit-xl
- If you need to check status, refer to 1.1 Adlink MXE 211 (SUMMIT + Lidar PC) below.
-
Interfacing on-board computers:
-
SSH:
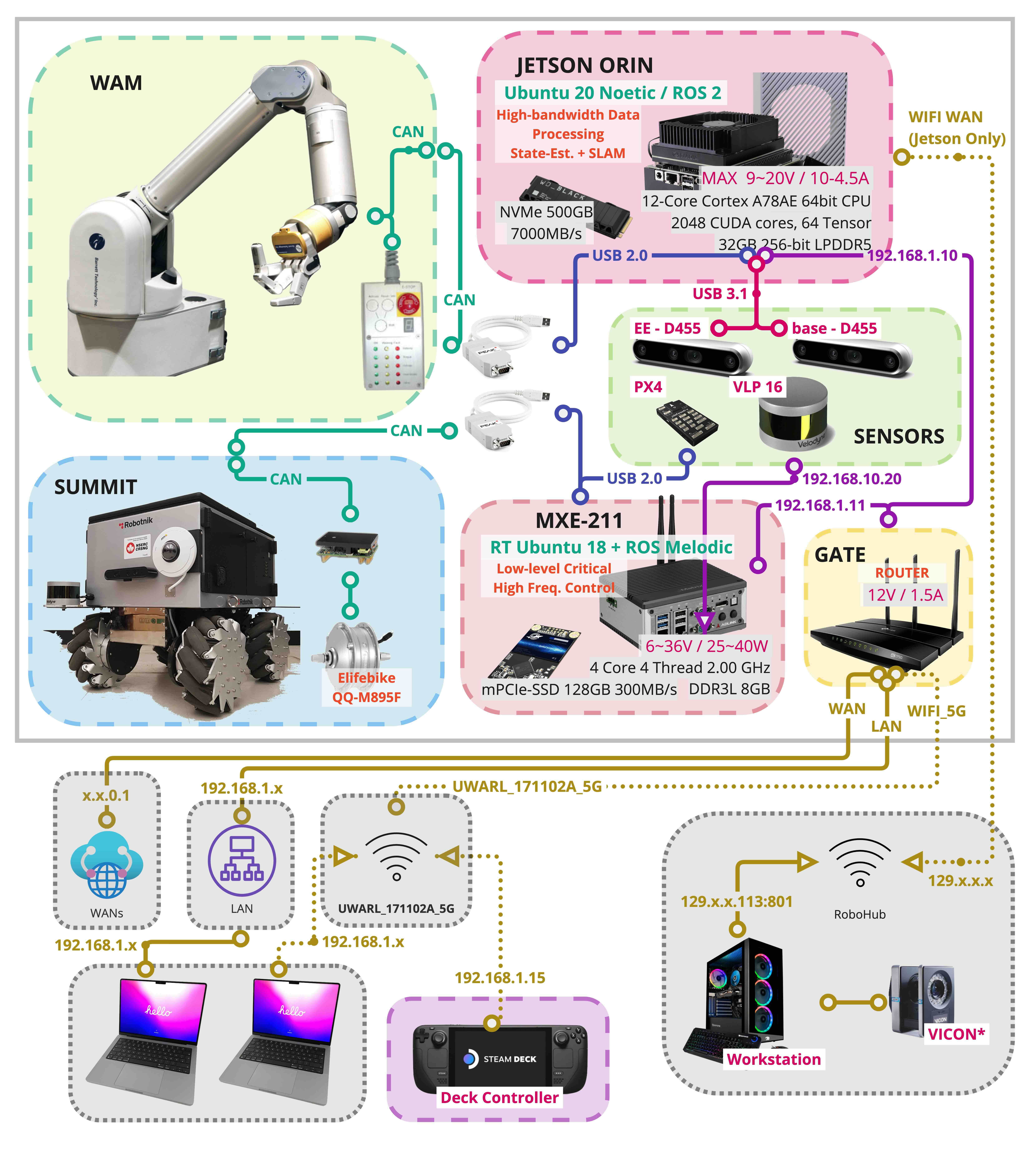
# Jetson: ssh [email protected] # Adlink: ssh [email protected] # Internal-WAM PC: ssh [email protected]
-
-
All shortcuts came with auto-configuration:
# sync across multi platform: # - but make sure the config is pointing at the same branch across platforms $ sync_latest # update (pull recursively in a batch) of the entire workspace with all required submodules (as noted in common.sh) from anywhere $ update_ws # build ws from anywhere $ build_ws # source ws from anywhere $ src_ws # source ~/.zshrc from anywhere $ src_zsh # cd into workspace from anywhere $ cd_ws # check wworkspace status from anywhere $ check_ws_status # cd into robot_configs from anywhere $ cd_config # auto-gen Table of Contents for a specific markdown file $ md_toc README.md # auto-gen Table of Contents for a specific directory containing all markdown files $ md_toc_dir docs
$ rm -rf ~/UWARL_catkin_ws
$ cd_config
$ ./scripts/auto-config_UWARL_catkin_ws.zsh# check driver status
$ systemctl status ds4drv.service-
Power on the robot, wait for computers to auto-boot
-
Check if default launch successful:
# SSH into adlink mxe211 (summit) $ ssh [email protected] # check if summit bringup is successful $ systemctl status --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch # stop/restart $ systemctl stop/restart --user roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch # [DEBUG] $ journalctl --user --user-unit=roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch > log.txt # [DEBUG] - Live Stream: $ journalctl --follow --user --user-unit=roscorelaunch@waterloo_steel_summit_bringup:waterloo_steel_summit.launch
# launch wam node:
$ roslaunch wam_node wam_node.launch
# example commands:
$ rosservice call /wam/go_home
$ rosservice call /wam/joint_move "joints:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0"$ roslaunch zed_wrapper zed.launch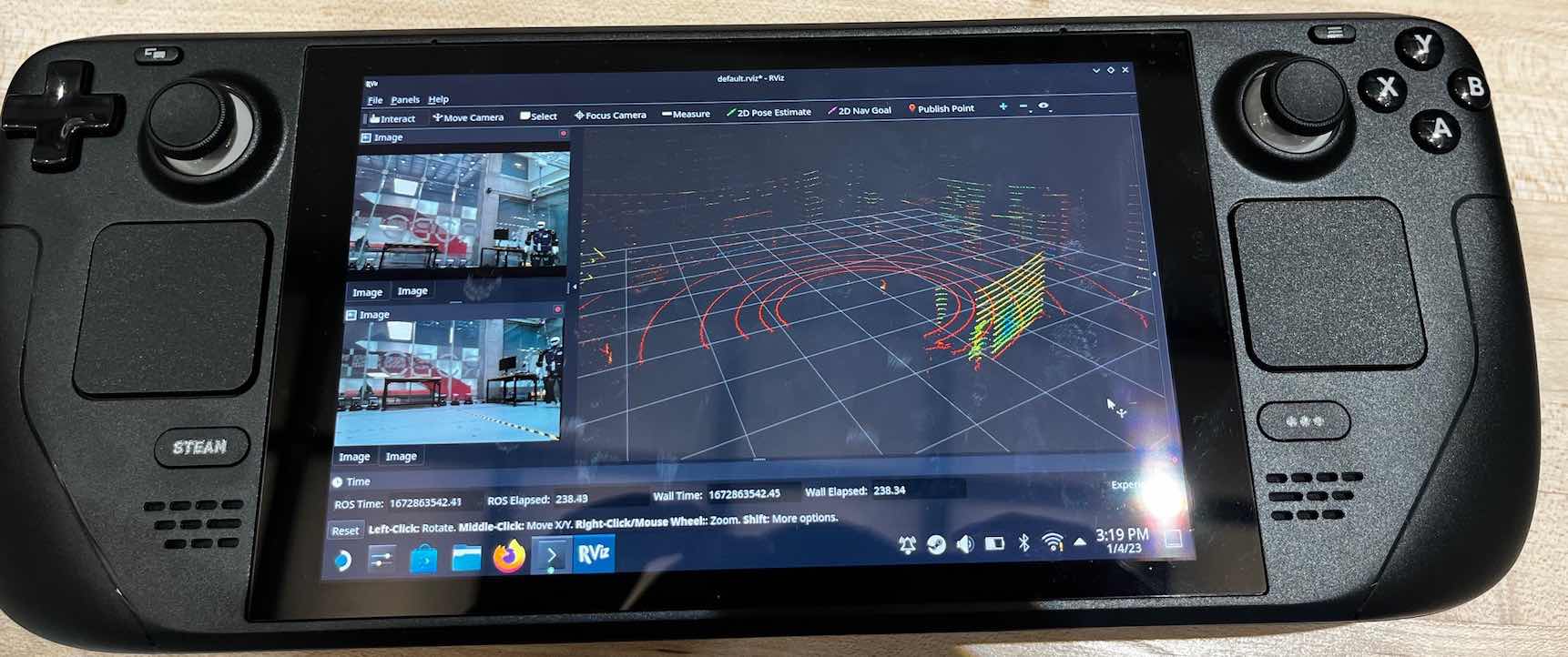
- 1️⃣ > Launch Pad
- 2️⃣ > Rviz Viewer
$ roslaunch summit_xl_pad waterloo_steel_summit_deck.launch$ rosrun rviz rviz- See up-to-date details from: *2. ⭐ Unified Development 🚧 [Local PC / Summit / WAM] (Melodic/Noetic):*
- See up-to-date details from: *3. ROS UWARL_catkin_ws Usage Guide:*
[TODO]
- Reads:
$ build_ws -DCMAKE_BUILD_TYPE=Debug
# in roslaunch file:
<launch>
<node name="wam_node" type="wam_node" pkg="wam_node" output="screen"
launch-prefix="gdb -ex run --args"
/>
</launch>-
Install:
-
$ sudo apt -y install valgrind $ sudo apt-get install kcachegrind # visualizer: #### roslaunch file add prefix: <launch> <node name="wam_node" type="wam_node" pkg="wam_node" output="screen" launch-prefix="valgrind --tool=callgrind --log-file=/home/uwarl-orin/JX_Logs/valgrind.log --callgrind-out-file='/home/uwarl-orin/JX_Logs/callgrind.wam_node.%p'" /> </launch>
-
-
Instructions:
-
$ build_ws -DCMAKE_BUILD_TYPE=Debug # enable core dumps: $ ulimit -a # check limits $ ulimit -c unlimited # unlimited # allow core dumps to be created: $ sudo echo 1 > /proc/sys/kernel/core_uses_pid
-
Instructions:
-
# make sure build with debug: $ build_ws -DCMAKE_BUILD_TYPE=Debug # OR: $ build_ws_debug # normal program run: $ rosrun vins vins_node $cam_config_file_path # run with valgrind: $ rosrun_valgrind vins vins_node $cam_config_file_path # -> check error causing memory dump: $ cat $HOME/valgrind_log.txt ##### OUTPUT: ==134393== Memcheck, a memory error detector ==134393== Copyright (C) 2002-2017, and GNU GPL'd, by Julian Seward et al. ==134393== Using Valgrind-3.15.0 and LibVEX; rerun with -h for copyright info ==134393== Command: /home/parallels/UWARL_catkin_ws/devel/lib/vins/vins_node /home/parallels/UWARL_catkin_ws/src/vins-research-pkg/VINS-Fusion/config/uwarl_d455/mono_rgb_imu_config_dual.yaml ==134393== Parent PID: 134030 ==134393== ==134393== Thread 7: ==134393== Invalid read of size 8 ==134393== at 0x4936B20: shared_count (shared_count.hpp:433) ==134393== by 0x4936B20: shared_ptr (shared_ptr.hpp:422) ==134393== by 0x4936B20: FeatureTracker::trackImage(double, cv::Mat const&, cv::Mat const&) (feature_tracker.cpp:199) ==134393== by 0x48B184B: Estimator::inputImage(double, cv::Mat const&, cv::Mat const&) (estimator.cpp:167) ==134393== by 0x19BCAB: sync_process() (rosNodeTest.cpp:126) ==134393== by 0x56B2FAB: ??? (in /usr/lib/aarch64-linux-gnu/libstdc++.so.6.0.28) ==134393== by 0x4E72623: start_thread (pthread_create.c:477) ==134393== by 0x596B49B: thread_start (clone.S:78) ==134393== Address 0x8 is not stack'd, malloc'd or (recently) free'd ==134393==
-
# options: $ rosrun_gdb $ rosrun_valgrind
rm -rf ~/.catkin_tools