Hardware - USB-EC3883-III-2019/EC3883-G09 GitHub Wiki
Como elemento principal para el procesamiento del proyecto, se utilizó el microcontolador MC9S08QE128, junto con la tarjeta de desarrollo DEMOQE128.
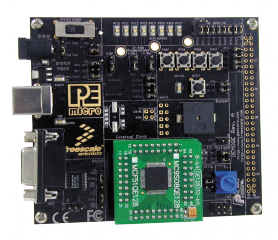
Microcontrolador DEMOQE128
Se utilizó el sensor ultrasónico SRF05.

Sensor ultrasónico SRF05
Este sensor es digital, funciona con una lógica de 5V y tiene 5 terminales:
- Vcc: alimentación de 5V.
- GND: tierra.
- Trigger: terminal donde se envía señal que activa el sensor. Debe estar en alto por al menos 10us.
- Echo: terminal donde se recibe la señal de eco.
- Do not connect: no conectado.
Funcionamiento: para activar el sensor, hay que aplicar una señal digital en alto por al menos 10us. Luego de esto, el sonar envía una onda ultrasónica correspondiente a un tren de 8 pulsos a 40KHz. Posteriormente, la señal de echo se pone en alto hasta que se recibe la onda reflejada. Si no se recibe la onda reflejada (no hay objetos en el rango del sensor) la señal de echo se mantiene en alto hasta haber transcurrido 36ms. Se deben esperar al menos 10ms luego de que la señal de echo cambia a estado bajo para poder realizar otra medición (activar el trigger). Para determinar la distancia en centímetros, se mide la duración de la señal echo en estado alto en microsegundos y se divide entre 58.
Se utilizó el sensor infrarrojo GP2Y0A21YK.

Sensor infrerrojo GP2Y0A21YK
Este sensor es analógico, se alimenta con 5V y tiene 3 terminales:
- Vcc: alimentación de 5V.
- GND: tierra.
- Analog output: salida analógica.
Funcionamiento: el voltaje que se obtiene en la salida analógica del sensor es convertido a distancia mediante una curva que se obtiene mediante la caracterización del sensor. El sensor actualiza la salida aproximadamente cada 50ms.
Como la salida del sensor es analógica, hay que hacer uso del ADC del microcontrolador y esto implica que hay que multiplicar por constantes para llevar el dato a voltaje, ya sea en el microcontrolador o en una PC. Para evitar esto, se caracterizó el sensor directamente con los datos del ADC y se eleboró la curva respuesta en función de los datos del ADC y la distancia en centímetros. El resultado de la caracterización fue la siguiente ecuación: distancia = 24067*x^(-1.011), donde x es el dato del ADC.
Se utilizó un motor de pasos y un driver, ambos con alimentación de 5V, de manera que se controla con una combianción de señales digitales provenientes del microcontrolador

Motor con plataforma para sensores (derecha) y driver (izquierda)
Para la alimentación de los circuitos integrados, sensores y motor, se utiliza un circuito regulador como el que se muestra a continuación.

Circuito de alimentación
El circuito consta de un diodo de potencia que se conecta a la fuente y al regulador de 5 voltios, además de capacitores que eliminan el rizado de los voltajes de salida y de entrada. Los capacitores de 10 y 100uF son electrolíticos, el del 100pF es de tántalo.
El circuito de protección, utilizado para las señales de entrada del microcontrolador (echo del sonar y voltaje del lidar), se muestra a continuación.

Circuito de protección
El circuito consta de un buffer realizado a partir de uno de los 4 op amps del integrado LM324. Además, se utiliza un capacitor electrolítico en la entrada de alimentación del integrado para evitar el rizado. La función del buffer es limitar la corriente que proviene de los sensores. A la salida del buffer se implementa un divisor de voltaje que se encarga de disminuir el voltaje proveniente de los sensores ya que ambos superan los 3V que soporta el microcontrolador.
Además, se colocó un capacitor de 100uF en los terminales de VCC de cada sensor para mitigar la variaciones que puedan surgir por el consumo de corriente del motor.

Asignación de pines del microcontrolador