SO 5.8 InDepth Agent States - Stiffstream/sobjectizer GitHub Wiki
- Basic
-
More Details
- Do Not Change Agent State From Enter/Exit Handlers
- Class state_t Is Not Thread Safe
- Limitation For Deep Of Substates
- Enter/Exit Handlers And noexcept
- Guarantee For Calling Of Exit Handler
- Shallow- And Deep-history
- The transfer_to_state Feature
- The suppress Feature
- Redefinition Of Enter/Exit Handler
- Reseting Of time_limit
- Lifetime Of state_t Objects
- Deactivation Of An Agent
Created by gh-md-toc
Agent in SObjectizer is a finite-state machine.
The behavior of an agent depends on the current state of the agent and the received message. An agent can receive and process different messages in each state. In other words, an agent can receive a message in one state but ignore it in another state. Or, if an agent receives the same message in several states, it can handle the message differently in each state.
Let’s imagine a simple agent which controls an LED indicator on some device.
It receives just one signal turn_on_off. When the LED indicator is off this signal should turn indicator on. If the LED indicator is on this signal should turn the indicator off.
This logic can be represented by simple statechart:
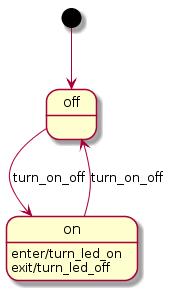
It's easy to see that led_indicator agent requires two states: off and on. They can be directly expressed in C++ code via usage of so_5::state_t class. The definition of a new state for an agent means the creation of a new instance of state_t.
States are usually represented as members of the agent’s class:
class led_indicator final : public so_5::agent_t
{
state_t off{ this }, on{ this };A state can have a textual name:
class led_indicator final : public so_5::agent_t
{
state_t off{ this, "off" }, on{ this, "on" };It could be useful for debugging and logging.
There are several ways of changing an agent’s state:
// Very old and basic way.
so_change_state( off );
// More modern and short way.
off.activate();
// Yet more modern way.
this >>= off;The current state can be obtained via so_current_state() method:
if( off == so_current_state() )
... // 'off' is active stateMethod so_is_active_state() can be used for checking of state activity:
if( so_is_active_state(off) )
... // 'off' is active stateEvery agent already has one state: the default one. The default state can be accessed via so_default_state() method:
// Returning agent to the default state.
this >>= so_default_state();The most important part of the usage of agent’s states is a subscription to a message with respect to a specific state. The simple usage of so_subscribe() and so_subscribe_self() methods leads to subscription only for the default agent’s state. It means that:
so_subscribe_self().event(...);is the equivalent of:
so_subscribe_self().in( so_default_state() ).event(...);To make subscription to a message for a specific state it is necessary to use in() method in a subscription chain:
so_subscribe_self().in( off ).event(...);
so_subscribe_self().in( on ).event(...);The in() methods can be chained if the same event handler is used in several states:
so_subscribe_self()
.in( off )
.in( on )
.event( [](mhood_t<get_name>) { std::cout << "led_indicator" << std::endl; } );
so_subscribe_self()
.in( off )
.event( [](mhood_t<get_status>) { std::cout << "off" << std::endl; } );There is another way to make subscription for a specific state:
off.event( [](mhood_t<get_name>) { std::cout << "led_indicator" << std::endl; } )
.event( [](mhood_t<get_status>) { std::cout << "off" << std::endl; } );
on.event( [](mhood_t<get_name>) { std::cout << "led_indicator" << std::endl; } )
.event( [](mhood_t<get_status>) { std::cout << "on" << std::endl; } );There are also on_enter/on_exit methods in state_t class.
Method on_enter sets up an enter handler. Enter handler is automatically called when the state is activated. Contrary on_exit method sets an exit handler. Exit handler is automatically called when the state is activated. Enter and exit handler can be a lambda-function or a pointer to a member method of the agent's class.
Note: enter and exit handlers must not throw exceptions.
In the led_indicator example enter and exit handlers are necessary for on state:
on.on_enter( [this]{ /* some device-dependent code */ } )
.on_exit( [this]{ /* some device-dependent code */ } )
...And now we can write the full code of led_indicator example:
class led_indicator final : public so_5::agent_t
{
state_t off{ this, "off" }, on{ this, "on" };
public :
struct turn_on_off final : public so_5::signal_t {};
led_indicator( context_t ctx ) : so_5::agent_t{ ctx }
{
// Initial state for an agent is the default one.
// We must switch agent to 'off' state manually.
this >>= off;
off.event( [this](mhood_t<turn_on_off>) { this >>= on; } );
on.on_enter( [this]{ /* some device-dependent code */ } )
.on_exit( [this]{ /* some device-dependent code */ } )
.event( [this](mhood_t<turn_on_off> { this >>= off; } );
}
};The led_indicator example demonstrates a simple finite-state machine. Since v.5.5.15 SObjectizer supports more advanced features of agents' states like composite states, shallow- and deep-history, time limitations and so on. These advanced features allow implementing agents as hierarchical state machines.
Let's see an ability to create hierarchical state machines on a slightly complex example: an agent which implements blinking of LED indicator. This agent receives turn_on_off signal for turning blinking on and off. When blinking is turned on then agent switches LED indicator on for 1s then switches it off for 1s then switches on again and so on until the agent receives next turn_on_off signal. A statechart for that agent can be represented as (note that this statechart represents yet more complex case which will be described later):
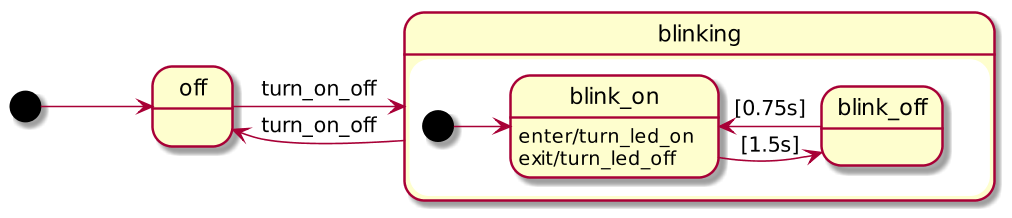
Agent blinking_led will have two top-level states: off and blinking. State blinking is a composite state with two substates: blink_on and blink_off. In C++ code this can be expressed this way:
class blinking_led final : public so_5::agent_t
{
state_t
off{ this, "off" },
blinking{ this, "blinking" },
blink_on{ initial_substate_of{ blinking }, "on" },
blink_off{ substate_of{ blinking }, "off" };Substate blink_on is marked as the initial substate of composite state blinking. It means that when state blinking is activated then substate blink_on is activated too.
Moreover so_current_state() method will return a reference to blink_on, not to blinking. It is because so_current_state() always returns a reference to a leaf state in agent's state tree.
Every composite state must have the initial substate.
It means that exactly one substate must be declared by using initial_substate_of indicator:
blink_on{ initial_substate_of{ blinking }, "on" },
blink_off{ substate_of{ blinking }, "off" };An attempt to activate a composite state without the initial substate defined will lead to an error at run-time.
Definition of behavior for composite states and substates is done usual way:
off
.event( [this](mhood_t<turn_on_off>) { this >>= blinking; } );
blinking
.on_enter( [this] {
m_timer = so_5::send_periodic< timer >(
*this, std::chrono::seconds::zero(), std::chrono::seconds{1} );
} )
.on_exit( [this]{ m_timer.release(); } )
.event( [this](mhood_t<turn_on_off>) { this >>= off; } );
blink_on
.on_enter( &blinking_led::led_on )
.on_exit( &blinking_led::led_off )
.event( [this](mhood_t<timer>) { this >>= blink_off; } );
blink_off
.event( [this](mhood_t<timer>) { this >>= blink_on; } );It's easy to see that many events look like:
event([this](mhood_t<Message>) { this >>= State; });This is a very typical case in complex statecharts.
There is a special method just_switch_to() which can simplify such cases. By using this method we can rewrite states behavior that way:
off
.just_switch_to< turn_on_off >( blinking );
blinking
.on_enter( [this] {
m_timer = so_5::send_periodic< timer >(
*this, std::chrono::seconds::zero(), std::chrono::seconds{1} );
} )
.on_exit( [this]{ m_timer.release(); } )
.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( &blinking_led::led_on )
.on_exit( &blinking_led::led_off )
.just_switch_to< timer >( blink_off );
blink_off
.just_switch_to< timer >( blink_on );Note that reaction to turn_on_off signal is defined only in off and blinking states. There are no such handles in substates blink_on and blink_off. It is not necessary because substates inherit event handlers from their parent states. Inheritance of event handlers means that event handler will be searched in the current state, then in its parent state, then in its parent state and so on...
In blinking_led agent, an event handler for turn_on_off signal will be searched in blink_on and blink_off states and then in blinking state. That is why we don't need to create a subscription for turn_on_off in blink_on and blink_off states.
Now we can write the full code of blinking_led agent:
class blinking_led final : public so_5::agent_t
{
state_t
off{ this, "off" },
blinking{ this, "blinking" },
blink_on{ initial_substate_of{ blinking }, "on" },
blink_off{ substate_of{ blinking }, "off" };
struct timer final : public so_5::signal_t {};
public :
struct turn_on_off final : public so_5::signal_t {};
blinking_led( context_t ctx ) : so_5::agent_t{ ctx }
{
this >>= off;
off
.just_switch_to< turn_on_off >( blinking );
blinking
.on_enter( [this] {
m_timer = so_5::send_periodic< timer >(
*this, std::chrono::seconds::zero(), std::chrono::seconds{1} );
} )
.on_exit( [this]{ m_timer.release(); } )
.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( &blinking_led::led_on )
.on_exit( &blinking_led::led_off )
.just_switch_to< timer >( blink_off );
blink_off
.just_switch_to< timer >( blink_on );
}
private :
so_5::timer_id_t m_timer;
void led_on() { /* some device-dependent code */ }
void led_off() { /* some device-dependent code */ }
};But what if we have to change the behavior of our blinking_led agent? Let's imagine that blinking_led agent has to switch LED on for 1.5s and then switch it off for 0.7s. How can we do that?
The obvious way is to use delayed signals with different timeouts in on_enter handlers for blink_on and blink_off states. But this way is not very easy in fact...
Usage of time_limit feature is much simpler. The time_limit feature dictates SObjectizer to limit time spent in the specific state. A clause like:
SomeState.time_limit(Timeout, AnotherState);Tells the SObjectizer that agent must be automatically switched from SomeState to AnotherState after Timeout spent in SomeState.
With time_limit feature the bllinking_led agent's implementation looks simpler and shorter:
class blinking_led final : public so_5::agent_t
{
state_t
off{ this, "off" },
blinking{ this, "blinking" },
blink_on{ initial_substate_of{ blinking }, "on" },
blink_off{ substate_of{ blinking }, "off" };
public :
struct turn_on_off final : public so_5::signal_t {};
blinking_led( context_t ctx ) : so_5::agent_t{ ctx }
{
this >>= off;
off
.just_switch_to< turn_on_off >( blinking );
blinking
.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( &blinking_led::led_on )
.on_exit( &blinking_led::led_off )
.time_limit( std::chrono::milliseconds{1500}, blink_off );
blink_off
.time_limit( std::chrono::milliseconds{750}, blink_on );
}
private :
void led_on() { /* some device-dependent code */ }
void led_off() { /* some device-dependent code */ }
};An enter/exit handler should not change the state of the agent.
Class so_5::state_t is not thread-safe. It is designed to be used inside an owner agent only. For example:
class my_agent : public so_5::agent_t
{
state_t first_state{ this, "first" };
state_t second_state{ this, "second" };
...
public :
my_agent( context_t ctx ) : so_5::agent_t{ ctx }
{
// It is a safe usage of state.
first_state.on_enter( &my_agent::first_on_enter );
second_state.on_exit( &my_agent::second_on_exit );
...
}
void so_define_agent() override
{
// It is a safe usage of state.
first_state.event( &my_agent::some_event_handler );
second_state.time_limit( std::chrono::seconds{20}, first_state );
second_state.event( [this]( const some_message & msg ) {
// It is also safe usage of state because event handler
// will be called on the context of agent's working thread.
second_state.drop_time_limit();
...
} );
}
void some_public_method()
{
// It is a safe usage if this method is called by the agent itself.
// This will be unsafe usage if this method is called from outside of
// the agent: a data damage or something like that can happen.
second_state.time_limit( std::chrono::seconds{30}, first_state );
}
...
};Because of that, it is necessary to be very careful during manipulation of agent's states outside of the agent's event handlers.
There is a limitation for deep of substates in SObjectizer v.5.5.15: there can be at most 16 nested states.
All enter/exit handlers must not throw exceptions. If an enter/exit handler throws an exception the whole application will be aborted. It is because there is no way to revert changes of agent's state change procedure if an enter/exit throws an exception.
Note. Since v.5.7.1 enter/exit handlers can be implemented as noexcept methods/functor. But older versions of SObjectizer didn't allow that and an attempt to set noexcept function/method as an enter/exit handler could lead to compilation errors.
If agent A is successfully registered and switched to state S then SObjectizer is guaranteed the call of exit handler for the state S in the following cases:
- switching to another state;
- an invocation of
so_evt_finish()as a result of deregistration of agent's coop or shutdown of SObjectizer Environment. An exit handler forSwill be called after return fromso_evt_finish().
It means that once an agent is registered the SObjectizer guarantees the call of exit handler. But exit handler will not be called if the agent is not registered. For example:
class some_agent : public so_5::agent_t
{
state_t S{ this };
...
public :
some_agent( context_t ctx ) : so_5::agent_t{ ctx }
{
S.on_exit( /* some handler */ );
this >>= S;
}
...
};
...
env.introduce_coop( []( so_5::coop_t & coop ) {
coop.make_agent< some_agent >();
... // Some other actions.
throw std::runtime_error( "Just a demo!" );
} );In this case, an agent of type some_agent will be created, the initial state for that agent will be S, but exit handler for S will not be called because of the failure of coop registration.
What does it mean?
It means that if you need to do some important task in exit handler then consider switching agent to that state only after successful registration of your agent. For example: in so_evt_start() method:
class some_agent : public so_5::agent_t
{
state_t S{ this };
...
public :
some_agent( context_t ctx ) : so_5::agent_t{ ctx }
{
S.on_exit(...); // some important code in the handler.
}
...
void so_evt_start() override
{
this >>= S;
}
};SObjectizer supports states with shallow- and deep-histories. To define a state with history it is necessary to use a constructor of state_t with an argument of type state_t::history_t:
class demo : public so_5::agent_t
{
// An anonymous state with shallow history.
state_t state1{ this, shallow_history };
// A state with name and shallow history.
state_t state2{ this, "two", shallow_history };
// An anonymous state with deep history.
state_t state3{ this, deep_history };
// A state with name and deep history.
state_t state4{ this, "four", deep_history };
// An initial substate with name and deep history.
state_t state5{ initial_substate_of{ state1 }, "five", deep_history };
// An anonymous substate with shallow history.
state_t state6{ substate_of{ state1 }, shallow_history };
...
};There is state_t::clear_history() method. But S.clear_history() clears history only for state S. History of any substate of S remains intact:
class demo final : public so_5::agent_t
{
state_t A{ this, "A", deep_history };
state_t B{ initial_substate_of{ A }, "B", shallow_history };
state_t C{ initial_substate_of{ B }, "C" };
state_t D{ substate_of{ B }, "D" };
state_t E{ this, "E" };
...
void some_event()
{
this >>= A; // The current state is "A.B.C"
// Because B is initial substate of A, and
// C is initial substate of B.
this >>= D; // The current state is "A.B.D".
this >>= E; // The current state is "E".
this >>= A; // The current state is "A.B.D" because deep history of A.
this >>= E;
A.clear_history();
this >>= A; // The current state is "A.B.D" because:
// B is the initial substate of A and B has shallow history;
// D is the last active substate of B.
}
};Method state_t::transfer_to_state() is intended for defering an event to another state. For example:
class device final : public so_5::agent_t
{
state_t off{ this };
state_t on{ this };
public :
struct volume_up final : public so_5::signal_t {};
struct volume_down final : public so_5::signal_t {};
...
void so_define_agent() override
{
off.transfer_to_state< volume_up >( on )
.transfer_to_state< volume_down >( on );
on.event( [this](mhood_t< volume_up >) { /* some reaction */ } )
.event( [this](mhood_t< volume_down >) { /* some reaction */ } );
}
};When agent device in state off and receives volume_up signal it automatically switches to state on and handler for volume_up is searched in state on.
Note that transfer_to_state can change agent state several times:
class demo final : public so_5::agent_t
{
state_t A{ this };
state_t B{ this };
state_t C{ this };
public :
struct do_something final : public so_5::signal_t {};
...
void so_define_agent() override
{
A.transfer_to_state< do_something >( B );
B.transfer_to_state< do_something >( C );
C.event< do_something >( ... );
...
}
};If agent demo is in state A and receives do_something signal it switches from A to B and then to C.
The transfer_to_state is a powerful but dangerous feature. There is no limitation for the deep of transfers of event from one state to another. Because of that, a user can create an infinite loop of transferring event between states.
Sometimes it is necessary to disable an event handler defined in the parent state. It can be done by state_t::suppress method:
class device final : public so_5::agent_t
{
state_t off{ this },
on{ this },
number_selection{ initial_substate_of{ on } },
dialling{ substate_of{ on } };
...
public :
...
void so_define_agent() override
{
on.event< key_cancel >( /* some reaction */ )
.event< key_grid >( /* some reaction */ )
.event< key_digit >( /* some reaction */ )
...;
dialling
// Only key_cancel can be processed in dialling state.
// Other events must be suppressed.
.suppress< key_digit >()
.suppress< key_grid >()
.event< key_cancel >( /* some reaction */ );
}
};Without suppressing of key_digit and key_grid events in dialling state handlers for them will be automatically found in on state (because of inheritance of event handlers).
Redefinition of enter or exit handler can be necessary when class inheritance is used. For example:
class basic_device : public so_5::agent_t
{
protected :
state_t activated{ this };
...
public :
...
void so_define_agent() override
{
activated.on_enter(
... // some complex code here
)
.event(...)
...;
}
};
...
class specific_device : public basic_device
{
public :
...
void so_define_agent() override
{
basic_device::so_define_agent();
...
// Addition of some specific action to activated.on_enter handler.
auto old_handler = activated.on_enter();
activated.on_enter( [old_handler] {
old_handler(); // Actions from base class.
... // some additional actions.
);
}
};The state_t::time_limit() method can be called several times in different places. Usually it is called only once somewhere in constructor or so_define_agent(), for example:
blinking_led::blinking_led( context_t ctx ) : so_5::agent_t{ std::move(ctx) }
{
blink_on.time_limit( std::chrono::milliseconds{1250}, blink_off )
...;
blink_off.time_limit( std::chrono::milliseconds{750}, blink_on )
...;
...
}But sometimes it is necessary to call time_limit in different places. It is possible and allowed. But there is a specialty: if S.time_limit is called when the agent is already in S state then time will tick on from the beginning. For example:
class inactivity_watcher final : public so_5::agent_t
{
state_t off{ this }, active{ this };
public :
inactivity_watcher( context_t ctx, const so_5::mbox_t & input )
: so_5::agent_t{ ctx }
{
off.transfer_to_state< key_cancel >( input, active )
.transfer_to_state< key_grid >( input, active )
.transfer_to_state< key_digit >( input, active );
// Switching to off state after 30 seconds of inactivity.
active.time_limit( std::chrono::seconds{30}, off )
.event( [this](mhood_t<key_cancel>) { update_timeout(); } )
.event( [this](mhood_t<key_grid>) { update_timeout(); } )
.event( [this]( const key_digit & ){ update_timeout(); } );
}
public :
void update_timeout()
{
active.time_limit( std::chrono::seconds{30}, off );
}
};Class state_t was developed to be used as a type of members of some agent class:
class basic_device : public so_5::agent_t
{
state_t deactivated{...};
state_t activated{...};
...
};
class specific_device : public basic_device
{
state_t paused{...};
state_t stopped{...};
...
};It means that lifetime of state_t objects will be automatically synchronized with lifetime of their owners.
This synchronization of lifetimes significantly simplifies the implementation of various aspects of agents in SObjectizer. Because of that, the recommended way of agent's state creation is the declaration of state_t object as a member of the corresponding agent's class.
But it is possible to create and destroy state_t objects manually. It is hard to imagine a situation where it can be necessary but it is possible to write something like that:
class some_crazy_agent : public so_5::agent_t
{
std::vector< std::unique_ptr< state_t > > m_additional_states;
...
void some_event()
{
// A bunch of states must be created.
for( int i = 0; i < 20; ++i )
{
auto s = std::make_unique< state_t >( this );
so_subscribe_self().in( *s ).event( ... );
m_additional_state.push_back( std::move(s) );
}
}
...
void some_another_event()
{
// Additional states no more needed.
for( auto & s : m_additional_states )
{
so_drop_subscription< some_signal >(
so_direct_mbox(),
*s );
s.reset();
}
m_additional_states.clear();
}
};But this approach is very dangerous because raw pointers to state objects are stored in different places (in agent as a pointer to the current state, in subscription storage, in history of parent state(s) and so on). If a pointer to state which must be destroyed manually is not removed from these places a dangling pointer will be created with corresponding consequences.
Sometimes an agent should fall into some failed state. For example:
class some_agent final : public so_5::agent_t
{
state_t st_working{ this, "working" };
state_t st_failed{ this, "failed" };
...
void on_enter_st_failed()
{
// Notify some supervisor about the failure.
// It will deregister the whole cooperation with failed agent.
so_5::send<msg_failure>( supervisor_mbox(), ... );
}
...
void so_define_agent() override
{
this >>= st_working;
st_failed.on_enter( &some_agent::on_enter_st_failed );
...
}
void evt_some_event(mhood_t<some_msg> cmd)
{
try
{
do_some_processing_of(*cmd);
}
catch(...)
{
// Processing failed, agent can't continue work normally.
// Have to switch it to the failed state and wait for
// the deregistration.
this >>= st_failed;
}
}
...
};This approach works but has a couple of drawbacks:
- it's necessary to define a separate state for an agent (like st_failed shown above);
- the agent still has all its subscriptions. It means that messages will be delivered to the agent's event queue and dispatched by the agent's dispatcher. They won't be handled because there are no subscriptions in a state like st_failed, but message dispatching will consume some resources, although the agent is a special 'failed' state.
To cope with those drawbacks so_deactivate_agent was introduced in v.5.7.3. That method drops all agent's subscriptions (including deadletter handlers and delivery filters) and switches the agent to a special hidden state in that the agent doesn't handle anything.
The example above now can be rewritten that way:
class some_agent final : public so_5::agent_t
{
state_t st_working{ this, "working" };
...
void switch_to_failed_state()
{
// Notify some supervisor about the failure.
// It will deregister the whole cooperation with failed agent.
so_5::send<msg_failure>( supervisor_mbox(), ... );
// Deactivate the agent.
so_deactivate_agent();
}
...
void so_define_agent() override
{
this >>= st_working;
...
}
void evt_some_event(mhood_t<some_msg> cmd)
{
try
{
do_some_processing_of(*cmd);
}
catch(...)
{
// Processing failed, agent can't continue work normally.
// Have to switch it to the failed state and wait for
// the deregistration.
switch_to_failed_state();
}
}
...
};Method agent_t::so_deactivate_state does the following:
- drops all agent's subscriptions (including deadletter handlers) and delivery filters;
- switches the agent to a special state in that the agent does nothing and just waits for the deregistration.
NOTE. The same mechanism is used when agent throws an exception from an event-handler and the exception reaction for the agent is set to so_5::deregister_coop_on_exception.